D2L - 18.3. Gaussian Process Inference
2023. 9. 10. 00:59 |
https://d2l.ai/chapter_gaussian-processes/gp-inference.html
18.3. Gaussian Process Inference — Dive into Deep Learning 1.0.3 documentation
d2l.ai
18.3. Gaussian Process Inference
In this section, we will show how to perform posterior inference and make predictions using the GP priors we introduced in the last section. We will start with regression, where we can perform inference in closed form. This is a “GPs in a nutshell” section to quickly get up and running with Gaussian processes in practice. We’ll start coding all the basic operations from scratch, and then introduce GPyTorch, which will make working with state-of-the-art Gaussian processes and integration with deep neural networks much more convenient. We will consider these more advanced topics in depth in the next section. In that section, we will also consider settings where approximate inference is required — classification, point processes, or any non-Gaussian likelihoods.
이 섹션에서는 지난 섹션에서 소개한 GP priors 을 사용하여 사후 추론을 수행하고 예측하는 방법을 보여줍니다. 닫힌 형식으로 추론을 수행할 수 있는 회귀부터 시작하겠습니다. 이것은 실제로 가우스 프로세스를 빠르게 시작하고 실행하기 위한 "간단한 GP" 섹션입니다. 모든 기본 작업을 처음부터 코딩하기 시작한 다음 GPyTorch를 소개합니다. 이를 통해 최첨단 가우스 프로세스 작업 및 심층 신경망과의 통합이 훨씬 더 편리해집니다. 다음 섹션에서는 이러한 고급 주제를 심층적으로 고려할 것입니다. 해당 섹션에서는 분류, 포인트 프로세스 또는 비가우시안 가능성 등 대략적인 추론이 필요한 설정도 고려할 것입니다.
Gaussian Process Inference 란?
**가우시안 프로세스 추론(Gaussian Process Inference)**은 기계 학습과 통계 모델링에서 사용되는 강력한 도구 중 하나입니다. 가우시안 프로세스(GP)는 확률적 모델로, 확률 분포의 모든 점을 정의하는 데 사용됩니다. 이것은 특히 회귀 및 분류 문제에 적합하며, 확률 분포의 평균 및 분산을 사용하여 예측을 수행합니다.
여기에서 가우시안 프로세스 추론의 주요 개념을 설명합니다:
- 프로세스 (Process): 가우시안 프로세스는 "확률적 프로세스"를 모델링하는 것으로 생각할 수 있습니다. 즉, 이는 입력과 출력 간의 관계를 설명하는데 사용되는 확률 모델입니다.
- 확률 분포: GP는 모든 입력 값에 대한 확률 분포를 정의합니다. 각 입력 값에 대해 출력 값이 가우시안 분포를 따른다고 가정합니다. 따라서 GP는 평균 및 공분산(또는 커널)을 통해 확률 분포를 특성화합니다.
- 커널 (Kernel): GP의 핵심 부분 중 하나는 커널 함수입니다. 커널 함수는 입력 값 사이의 상관 관계를 정의합니다. 이것은 입력 값 간의 유사성을 측정하고 출력 값의 상관 관계를 결정하는 데 사용됩니다. 일반적으로 RBF(라디얼 베이시스 함수) 커널 또는 신경망 커널 등 다양한 커널 함수를 사용할 수 있습니다.
- 추론 (Inference): GP는 주어진 입력 값에 대한 출력 값을 추론하는 데 사용됩니다. 기존의 관찰 값을 기반으로 평균 및 분산을 계산하고, 이를 통해 예측값과 예측의 불확실성을 제공합니다. 이러한 예측은 회귀 문제와 분류 문제에서 모두 유용합니다.
- 하이퍼파라미터 (Hyperparameters): GP는 커널 함수의 하이퍼파라미터를 가집니다. 이러한 하이퍼파라미터는 모델을 학습하는 동안 조정되며, 모델의 적합성을 향상시키기 위해 최적화됩니다.
- 확률적 예측: GP는 확률적 모델이므로 예측값에 대한 불확실성을 제공합니다. 이것은 예측값이 얼마나 신뢰할 수 있는지를 알려줍니다.
가우시안 프로세스 추론은 주로 회귀 문제를 해결하는 데 사용되며, 데이터에 대한 예측 분포를 생성하여 모델의 불확실성을 고려합니다. 또한 하이퍼파라미터 최적화, 확률적 함수 샘플링 및 데이터 불확실성 추론과 같은 다양한 응용 분야에서 활용됩니다.
18.3.1. Posterior Inference for Regression
An observation model relates the function we want to learn, f(x), to our observations y(x), both indexed by some input x. In classification, x could be the pixels of an image, and y could be the associated class label. In regression, y typically represents a continuous output, such as a land surface temperature, a sea-level, a CO2 concentration, etc.
관측 모델은 우리가 학습하려는 함수 f(x)를 관측값 y(x)에 연결합니다. 둘 다 일부 입력 x에 의해 인덱싱됩니다. 분류에서 x는 이미지의 픽셀이 될 수 있고 y는 관련 클래스 레이블이 될 수 있습니다. 회귀 분석에서 y는 일반적으로 지표면 온도, 해수면, CO2 농도 등과 같은 연속 출력을 나타냅니다.
In regression, we often assume the outputs are given by a latent noise-free function f(x) plus i.i.d. Gaussian noise ϵ(x):
회귀 분석에서 우리는 종종 출력이 잠재 잡음 없는 함수 f(x) + i.i.d로 제공된다고 가정합니다. 가우스 잡음 ϵ(x):

with ϵ(x)∼N(0,σ2). Let y=y(X)=(y(x1),…,y(xn))**⊤ be a vector of our training observations, and f=(f(x1),…,f(xn))**⊤ be a vector of the latent noise-free function values, queried at the training inputs X=x1,…,xn.
ϵ(x)∼N(0,σ2)입니다. y=y(X)=(y(x1),…,y(xn))**⊤를 훈련 관측값의 벡터로 두고 f=(f(x1),…,f(xn))** ⊤ 훈련 입력 X=x1,…,xn에서 쿼리된 잠재 잡음 없는 함수 값의 벡터입니다.
We will assume f(x)∼GP(m,k), which means that any collection of function values f has a joint multivariate Gaussian distribution, with mean vector μi=m(xi) and covariance matrix Kij=k(xi,xj). The RBF kernel k(xi,xj)=a**2 exp(− 1/2ℓ**2||xi−xj||**2) would be a standard choice of covariance function. For notational simplicity, we will assume the mean function m(x)=0; our derivations can easily be generalized later on.
우리는 f(x)∼GP(m,k)를 가정할 것입니다. 이는 f의 모든 함수 값 모음이 평균 벡터 μi=m(xi) 및 공분산 행렬 Kij=k(xi,xj를 갖는 결합 다변량 가우스 분포를 갖는다는 것을 의미합니다. ). RBF 커널 k(xi,xj)=a**2 exp(− 1/2ℓ**2||xi−xj||**2)는 공분산 함수의 표준 선택입니다. 표기를 단순화하기 위해 평균 함수 m(x)=0으로 가정합니다. 우리의 유도는 나중에 쉽게 일반화될 수 있습니다.
Suppose we want to make predictions at a set of inputs
일련의 입력에 대해 예측을 하고 싶다고 가정해 보겠습니다.

Then we want to find x**2 and p(f∗|y,X). In the regression setting, we can conveniently find this distribution by using Gaussian identities, after finding the joint distribution over f∗=f(X∗) and y.
그런 다음 x**2와 p(f*|y,X)를 찾고 싶습니다. 회귀 설정에서 f*=f(X*) 및 y에 대한 결합 분포를 찾은 후 가우스 항등식을 사용하여 이 분포를 편리하게 찾을 수 있습니다.
If we evaluate equation (18.3.1) at the training inputs X, we have y=f+ϵ. By the definition of a Gaussian process (see last section), f∼N(0,K(X,X)) where K(X,X) is an n×n matrix formed by evaluating our covariance function (aka kernel) at all possible pairs of inputs xi,xj∈X. ϵ is simply a vector comprised of iid samples from N(0,σ**2) and thus has distribution N(0,σ**2I). y is therefore a sum of two independent multivariate Gaussian variables, and thus has distribution N(0,K(X,X)+σ**2I). One can also show that cov(f∗,y)=cov(y,f∗)**⊤=K(X∗,X) where K(X∗,X) is an m×n matrix formed by evaluating the kernel at all pairs of test and training inputs.
훈련 입력 X에서 방정식 (18.3.1)을 평가하면 y=f+ϵ가 됩니다. 가우스 프로세스(마지막 섹션 참조)의 정의에 따르면 f∼N(0,K(X,X)) 여기서 K(X,X)는 공분산 함수(일명 커널)를 평가하여 형성된 n×n 행렬입니다. 가능한 모든 입력 쌍 xi,xj∈X. ϵ는 단순히 N(0,σ**2)의 iid 샘플로 구성된 벡터이므로 분포 N(0,σ**2I)를 갖습니다. 따라서 y는 두 개의 독립적인 다변량 가우스 변수의 합이므로 분포 N(0,K(X,X)+σ**2I)를 갖습니다. cov(f*,y)=cov(y,f*)**⊤=K(X*,X) 여기서 K(X*,X)는 커널을 평가하여 형성된 m×n 행렬임을 보여줄 수도 있습니다. 모든 테스트 및 훈련 입력 쌍에서.

We can then use standard Gaussian identities to find the conditional distribution from the joint distribution (see, e.g., Bishop Chapter 2), f∗|y,X,X∗∼N(m∗,S∗), where m∗=K(X∗,X)[K(X,X)+σ**2 I]**−1 y, and S=K(X∗,X∗)−K(X∗,X)[K(X,X)+σ**2 I]**−1 K(X,X∗).
그런 다음 표준 가우스 항등식을 사용하여 결합 분포(예: Bishop 2장 참조) f*|y,X,X*∼N(m*,S*)에서 조건부 분포를 찾을 수 있습니다. 여기서 m*=K (X*,X)[K(X,X)+σ**2 I]**−1 y, S=K(X*,X*)−K(X*,X)[K(X, X)+σ**2 I]**−1 K(X,X**).
Typically, we do not need to make use of the full predictive covariance matrix S, and instead use the diagonal of S for uncertainty about each prediction. Often for this reason we write the predictive distribution for a single test point x∗, rather than a collection of test points.
일반적으로 전체 예측 공분산 행렬 S를 사용할 필요가 없으며 대신 각 예측에 대한 불확실성을 위해 S의 대각선을 사용합니다. 이러한 이유로 우리는 테스트 포인트 모음이 아닌 단일 테스트 포인트 x*에 대한 예측 분포를 작성하는 경우가 많습니다.
The kernel matrix has parameters θ that we also wish to estimate, such the amplitude 'a' and lengthscale ℓ of the RBF kernel above. For these purposes we use the marginal likelihood, p(y|θ,X), which we already derived in working out the marginal distributions to find the joint distribution over y,f∗. As we will see, the marginal likelihood compartmentalizes into model fit and model complexity terms, and automatically encodes a notion of Occam’s razor for learning hyperparameters. For a full discussion, see MacKay Ch. 28 (MacKay, 2003), and Rasmussen and Williams Ch. 5 (Rasmussen and Williams, 2006).
커널 행렬에는 위의 RBF 커널의 진폭 'a' 및 길이 척도 ℓ와 같이 추정하려는 매개변수 θ가 있습니다. 이러한 목적을 위해 우리는 y,f*에 대한 결합 분포를 찾기 위해 한계 분포를 계산할 때 이미 도출한 한계 우도 p(y|θ,X)를 사용합니다. 앞으로 살펴보겠지만, 한계 우도는 모델 적합성 및 모델 복잡성 용어로 분류되고 하이퍼파라미터 학습을 위한 Occam 면도칼 개념을 자동으로 인코딩합니다. 전체 토론을 보려면 MacKay Ch. 28(MacKay, 2003), Rasmussen 및 Williams Ch. 5 (라스무센과 윌리엄스, 2006).
import math
import os
import gpytorch
import matplotlib.pyplot as plt
import numpy as np
import torch
from scipy import optimize
from scipy.spatial import distance_matrix
from d2l import torch as d2l
d2l.set_figsize()위의 코드는 여러 Python 라이브러리 및 모듈을 가져오고 환경을 설정하는 부분입니다. 코드의 각 부분에 대한 설명은 다음과 같습니다:
- import math: Python의 수학 함수와 상수에 액세스하기 위한 라이브러리인 math를 가져옵니다.
- import os: 운영 체제와 상호 작용하기 위한 라이브러리인 os를 가져옵니다.
- import gpytorch: Gaussian Process 모델을 구현하고 조작하기 위한 라이브러리인 gpytorch를 가져옵니다. Gaussian Process는 확률 기반 회귀 및 분류 모델링에 사용됩니다.
- import matplotlib.pyplot as plt: 데이터 시각화를 위한 Matplotlib 라이브러리의 서브 모듈인 pyplot을 가져옵니다.
- import numpy as np: 다차원 배열 및 수학 함수를 제공하는 NumPy 라이브러리를 가져옵니다.
- import torch: PyTorch 딥 러닝 라이브러리를 가져옵니다. PyTorch는 신경망 및 텐서 연산을 구현하는 데 사용됩니다.
- from scipy import optimize: 과학 및 공학 계산을 위한 SciPy 라이브러리의 optimize 모듈을 가져옵니다. 이 모듈은 최적화 문제를 다루는 데 사용됩니다.
- from scipy.spatial import distance_matrix: SciPy 라이브러리에서 distance_matrix 함수를 가져옵니다. 이 함수는 점들 간의 거리 행렬을 계산하는 데 사용됩니다.
- from d2l import torch as d2l: "d2l" 모듈에서 "torch" 모듈을 가져옵니다. "d2l" 모듈은 딥 러닝 및 기계 학습 교육을 위한 도구와 함수를 제공합니다.
- d2l.set_figsize(): D2L(Data Science for Dummies) 라이브러리의 set_figsize 함수를 호출하여 그림의 크기를 설정합니다. 이 함수는 일반적으로 그림의 크기를 조절하기 위해 사용됩니다.
이 코드는 다양한 라이브러리와 모듈을 가져오고, 환경을 설정하여 데이터 분석 및 시각화 작업을 수행할 준비를 하고 있습니다. 이 코드 자체는 데이터를 처리하거나 모델을 구축하지 않으며, 뒤에 나오는 코드 블록에서 작업이 이루어질 것입니다.
Posterior Inference for Regression이란? (GPT 답변)
*Posterior Inference for Regression(회귀를 위한 사후 추론)**는 기계 학습 및 통계에서 주로 사용되는 개념 중 하나입니다. 이것은 회귀 문제에서 예측 모델의 불확실성을 추정하고, 주어진 입력에 대한 출력값의 분포를 모델링하는 프로세스입니다. Posterior Inference는 가우시안 프로세스(GP)와 같은 확률적 모델 또는 베이지안 회귀와 관련이 있습니다. 아래에서 Posterior Inference for Regression의 주요 개념을 설명합니다:
- 사후 분포(Posterior Distribution): Posterior Inference에서 가장 중요한 개념은 사후 분포입니다. 사후 분포는 모델 파라미터에 대한 확률 분포로, 관찰된 데이터에 대한 정보를 사용하여 업데이트됩니다. 즉, 사후 분포는 관찰된 데이터에 따라 모델 파라미터가 어떻게 업데이트되어야 하는지를 나타냅니다.
- 베이지안 추론(Bayesian Inference): Posterior Inference는 베이지안 추론의 한 형태입니다. 베이지안 추론은 모델 파라미터의 사후 분포를 계산하는 과정을 포함하며, 이를 통해 모델의 불확실성을 추정합니다.
- 사후 평균(Posterior Mean): 사후 분포의 평균은 모델 파라미터의 최상의 추정치를 제공합니다. 이것은 예측 모델의 예측값에 대한 추정치로 사용됩니다.
- 사후 분산(Posterior Variance): 사후 분포의 분산은 모델 파라미터에 대한 불확실성을 나타냅니다. 높은 사후 분산은 모델 파라미터의 불확실성이 크다는 것을 의미하며, 예측의 불확실성에 영향을 미칩니다.
- 사후 예측(Posterior Prediction): 사후 분포를 사용하여 주어진 입력에 대한 출력값의 분포를 예측합니다. 이것은 예측 모델의 불확실성을 고려하는 중요한 부분입니다.
- 하이퍼파라미터 최적화(Hyperparameter Optimization): Posterior Inference를 사용하여 모델의 하이퍼파라미터를 최적화할 수 있습니다. 모델의 하이퍼파라미터를 조정하면 모델의 성능을 향상시킬 수 있습니다.
회귀 문제에서 Posterior Inference는 주로 Bayesian 회귀 모델, 가우시안 프로세스 회귀 및 베이지안 최적화에서 사용됩니다. 이를 통해 모델의 예측 불확실성을 고려하여 더 신뢰할 수 있는 예측을 수행할 수 있습니다.
18.3.2. Equations for Making Predictions and Learning Kernel Hyperparameters in GP Regression
We list here the equations you will use for learning hyperparameters and making predictions in Gaussian process regression. Again, we assume a vector of regression targets y, indexed by inputs X={x1,…,xn}, and we wish to make a prediction at a test input x∗. We assume i.i.d. additive zero-mean Gaussian noise with variance σ**2. We use a Gaussian process prior f(x)∼GP(m,k) for the latent noise-free function, with mean function m and kernel function k. The kernel itself has parameters θ that we want to learn. For example, if we use an RBF kernel, k(xi,xj)=a**2 exp(− 1/2ℓ**2||x−x′||**2), we want to learn θ={a**2,ℓ**2}. Let K(X,X) represent an n×n matrix corresponding to evaluating the kernel for all possible pairs of n training inputs. Let K(x∗,X) represent a 1×n vector formed by evaluating k(x∗,xi), i=1,…,n. Let μ be a mean vector formed by evaluating the mean function m(x) at every training points x.
여기에 하이퍼파라미터를 학습하고 가우스 프로세스 회귀에서 예측하는 데 사용할 방정식이 나열되어 있습니다. 다시, 우리는 입력 X={x1,…,xn}에 의해 인덱싱된 회귀 목표 y의 벡터를 가정하고 테스트 입력 x*에서 예측을 만들고 싶습니다. 우리는 i.i.d를 가정합니다. 분산이 σ**2인 가산성 제로 평균 가우스 노이즈. 평균 함수 m과 커널 함수 k를 사용하여 잠재 잡음 없는 함수에 대해 f(x)∼GP(m,k) 이전의 가우스 프로세스를 사용합니다. 커널 자체에는 우리가 배우고 싶은 매개변수 θ가 있습니다. 예를 들어, RBF 커널 k(xi,xj)=a**2 exp(− 1/2ℓ**2||x−x′||**2)를 사용하는 경우 θ=를 배우고 싶습니다. {a**2,ℓ**2}. K(X,X)는 가능한 모든 n 훈련 입력 쌍에 대해 커널을 평가하는 데 해당하는 n×n 행렬을 나타냅니다. K(x*,X)는 k(x*,xi), i=1,…,n을 평가하여 형성된 1×n 벡터를 나타낸다고 가정합니다. μ를 모든 트레이닝 포인트 x에서 평균 함수 m(x)를 평가하여 형성된 평균 벡터로 둡니다.
Typically in working with Gaussian processes, we follow a two-step procedure. 1. Learn kernel hyperparameters θ^ by maximizing the marginal likelihood with respect to these hyperparameters. 2. Use the predictive mean as a point predictor, and 2 times the predictive standard deviation to form a 95% credible set, conditioning on these learned hyperparameters θ^.
일반적으로 가우스 프로세스를 사용하여 작업할 때 우리는 2단계 절차를 따릅니다. 1. 이러한 하이퍼파라미터에 대한 한계 가능성을 최대화하여 커널 하이퍼파라미터 θ^를 학습합니다. 2. 예측 평균을 점 예측 변수로 사용하고 예측 표준 편차의 2배를 사용하여 학습된 하이퍼파라미터 θ^를 조건으로 하여 95% 신뢰할 수 있는 세트를 형성합니다.
The log marginal likelihood is simply a log Gaussian density, which has the form:
로그 한계 우도는 단순히 로그 가우스 밀도이며 다음과 같은 형식을 갖습니다.

The predictive distribution has the form:
예측 분포의 형식은 다음과 같습니다.

18.3.3. Interpreting Equations for Learning and Predictions
There are some key points to note about the predictive distributions for Gaussian processes:
가우스 프로세스의 예측 분포에 대해 주목해야 할 몇 가지 핵심 사항이 있습니다.
- Despite the flexibility of the model class, it is possible to do exact Bayesian inference for GP regression in closed form. Aside from learning the kernel hyperparameters, there is no training. We can write down exactly what equations we want to use to make predictions. Gaussian processes are relatively exceptional in this respect, and it has greatly contributed to their convenience, versatility, and continued popularity.
모델 클래스의 유연성에도 불구하고 GP 회귀에 대한 정확한 베이지안 추론을 닫힌 형식으로 수행하는 것이 가능합니다. 커널 하이퍼파라미터를 학습하는 것 외에는 교육이 없습니다. 예측을 하기 위해 어떤 방정식을 사용하고 싶은지 정확하게 적을 수 있습니다. 가우스 프로세스는 이 점에서 상대적으로 예외적이며 편의성, 다양성 및 지속적인 인기에 크게 기여했습니다.
- The predictive mean a∗ is a linear combination of the training targets y, weighted by the kernel kθ(x∗,X)[Kθ(x,X)+σ**2 I]**−1. As we will see, the kernel (and its hyperparameters) thus plays a crucial role in the generalization properties of the model.
예측 평균 a*는 커널 kθ(x*,X)[Kθ(x,X)+σ**2 I]**−1에 의해 가중치가 부여된 훈련 목표 y의 선형 조합입니다. 앞으로 살펴보겠지만 커널(및 해당 하이퍼파라미터)은 모델의 일반화 속성에서 중요한 역할을 합니다.
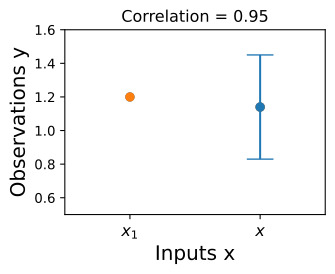
- The predictive mean explicitly depends on the target values y but the predictive variance does not. The predictive uncertainty instead grows as the test input x∗ moves away from the target locations X, as governed by the kernel function. However, uncertainty will implicitly depend on the values of the targets y through the kernel hyperparameters θ, which are learned from the data.
예측 평균은 명시적으로 목표 값 y에 따라 달라지지만 예측 분산은 그렇지 않습니다. 대신 커널 함수에 따라 테스트 입력 x*가 목표 위치 X에서 멀어짐에 따라 예측 불확실성이 커집니다. 그러나 불확실성은 데이터에서 학습된 커널 하이퍼파라미터 θ를 통해 목표 y의 값에 암묵적으로 의존합니다.
- The marginal likelihood compartmentalizes into model fit and model complexity (log determinant) terms. The marginal likelihood tends to select for hyperparameters that provide the simplest fits that are still consistent with the data.
한계 우도는 모델 적합성과 모델 복잡성(로그 결정 요인) 항으로 구분됩니다. 한계 우도는 데이터와 여전히 일치하는 가장 단순한 적합치를 제공하는 초매개변수를 선택하는 경향이 있습니다.
- The key computational bottlenecks come from solving a linear system and computing a log determinant over an n×n symmetric positive definite matrix K(X,X) for n training points. Naively, these operations each incur O(n**3) computations, as well as O(n**2) storage for each entry of the kernel (covariance) matrix, often starting with a Cholesky decomposition. Historically, these bottlenecks have limited GPs to problems with fewer than about 10,000 training points, and have given GPs a reputation for “being slow” that has been inaccurate now for almost a decade. In advanced topics, we will discuss how GPs can be scaled to problems with millions of points.
주요 계산 병목 현상은 선형 시스템을 풀고 n 훈련 포인트에 대한 n×n 대칭 양의 정부호 행렬 K(X,X)에 대한 로그 행렬식을 계산하는 데서 발생합니다. 기본적으로 이러한 작업은 각각 O(n**3) 계산을 발생시키고 커널(공분산) 행렬의 각 항목에 대해 O(n**2) 저장을 발생시키며, 종종 Cholesky 분해로 시작됩니다. 역사적으로 이러한 병목 현상으로 인해 GP는 훈련 포인트가 약 10,000개 미만인 문제로 제한되었으며 GP는 "느리다"는 평판을 얻었으며 현재는 거의 10년 동안 부정확해졌습니다. 고급 주제에서는 GP를 수백만 포인트의 문제로 확장하는 방법에 대해 논의합니다.
- For popular choices of kernel functions, K(X,X) is often close to singular, which can cause numerical issues when performing Cholesky decompositions or other operations intended to solve linear systems. Fortunately, in regression we are often working with Kθ(X,X)+σ**2 I, such that the noise variance σ**2 gets added to the diagonal of K(X,X), significantly improving its conditioning. If the noise variance is small, or we are doing noise free regression, it is common practice to add a small amount of “jitter” to the diagonal, on the order of 10**−6, to improve conditioning.
널리 사용되는 커널 함수 선택의 경우 K(X,X)는 종종 특이값에 가깝습니다. 이는 Cholesky 분해 또는 선형 시스템을 풀기 위한 기타 연산을 수행할 때 수치 문제를 일으킬 수 있습니다. 다행스럽게도 회귀 분석에서는 종종 Kθ(X,X)+σ**2 I로 작업하여 잡음 분산 σ**2가 K(X,X)의 대각선에 추가되어 조건이 크게 향상됩니다. 노이즈 분산이 작거나 노이즈 없는 회귀를 수행하는 경우 컨디셔닝을 개선하기 위해 대각선에 10**−6 정도의 소량의 "지터"를 추가하는 것이 일반적입니다.
18.3.4. Worked Example from Scratch
Let’s create some regression data, and then fit the data with a GP, implementing every step from scratch. We’ll sample data from
회귀 데이터를 생성한 다음 GP로 데이터를 맞추고 모든 단계를 처음부터 구현해 보겠습니다. 다음에서 데이터를 샘플링하겠습니다.

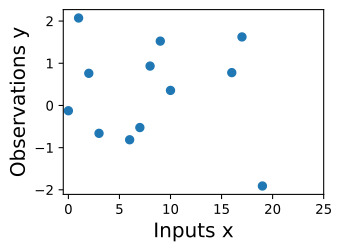
with ϵ∼N(0,σ**2). The noise free function we wish to find is f(x)=sin(x)+1/2 sin(4x). We’ll start by using a noise standard deviation σ=0.25.
ϵ∼N(0,σ**2)입니다. 우리가 찾고자 하는 잡음 없는 함수는 f(x)=sin(x)+1/2 sin(4x)입니다. 잡음 표준편차 σ=0.25를 사용하여 시작하겠습니다.
def data_maker1(x, sig):
return np.sin(x) + 0.5 * np.sin(4 * x) + np.random.randn(x.shape[0]) * sig
sig = 0.25
train_x, test_x = np.linspace(0, 5, 50), np.linspace(0, 5, 500)
train_y, test_y = data_maker1(train_x, sig=sig), data_maker1(test_x, sig=0.)
d2l.plt.scatter(train_x, train_y)
d2l.plt.plot(test_x, test_y)
d2l.plt.xlabel("x", fontsize=20)
d2l.plt.ylabel("Observations y", fontsize=20)
d2l.plt.show()위의 코드는 데이터 생성 및 시각화를 수행하는 파이썬 프로그램입니다. 코드의 각 부분에 대한 설명은 다음과 같습니다:
- def data_maker1(x, sig):: 이 줄은 data_maker1라는 사용자 지정 함수를 정의합니다. 이 함수는 두 개의 입력 매개변수 x와 sig를 받습니다. x는 입력 데이터로 사용되며, sig는 노이즈의 크기를 나타내는 표준 편차입니다.
- return np.sin(x) + 0.5 * np.sin(4 * x) + np.random.randn(x.shape[0]) * sig: 이 줄은 입력 데이터 x에 대한 관측치를 생성합니다. 관측치는 sin 함수와 4배 주파수가 높은 sin 함수를 합한 값에 노이즈를 추가한 결과입니다. 노이즈는 평균이 0이고 표준 편차가 sig인 정규 분포에서 생성됩니다.
- sig = 0.25: 이 줄은 데이터 생성에 사용할 노이즈의 크기를 나타내는 sig 변수를 설정합니다. 이 변수는 0.25로 설정되어 있습니다.
- train_x, test_x = np.linspace(0, 5, 50), np.linspace(0, 5, 500): 이 줄은 학습 데이터와 테스트 데이터의 x 값 범위를 생성합니다. np.linspace 함수를 사용하여 0부터 5까지의 범위를 50개의 등간격으로 분할한 것과 500개의 등간격으로 분할한 것을 각각 train_x와 test_x에 할당합니다.
- train_y, test_y = data_maker1(train_x, sig=sig), data_maker1(test_x, sig=0.): 이 줄은 data_maker1 함수를 사용하여 학습 데이터와 테스트 데이터에 대한 관측치 train_y와 test_y를 생성합니다. 학습 데이터의 경우 sig 변수 값을 사용하고, 테스트 데이터의 경우 노이즈 없이 생성됩니다.
- d2l.plt.scatter(train_x, train_y): 이 줄은 학습 데이터를 산점도로 시각화합니다. train_x와 train_y는 x와 y 축에 대한 데이터 포인트를 나타냅니다.
- d2l.plt.plot(test_x, test_y): 이 줄은 테스트 데이터를 선 그래프로 시각화합니다. test_x와 test_y는 x와 y 축에 대한 데이터 포인트를 나타냅니다.
- d2l.plt.xlabel("x", fontsize=20) 및 d2l.plt.ylabel("Observations y", fontsize=20): 이 두 줄은 x 축과 y 축에 라벨을 추가하고 글꼴 크기를 설정합니다.
- d2l.plt.show(): 이 줄은 그래프를 화면에 표시합니다.
이 코드는 sin 함수와 노이즈를 추가하여 가상의 데이터를 생성하고, 학습 데이터와 테스트 데이터를 시각화하여 데이터의 분포를 확인하는 데 사용됩니다.
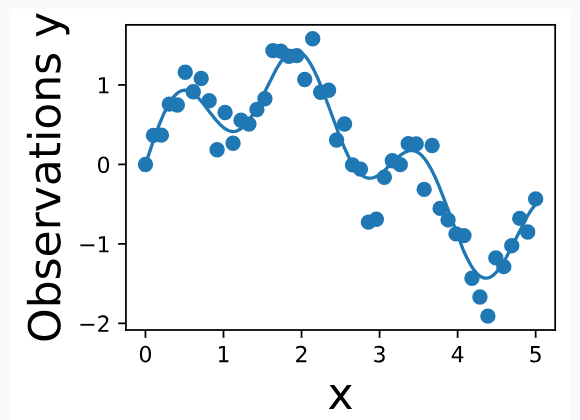
Here we see the noisy observations as circles, and the noise-free function in blue that we wish to find.
여기서는 잡음이 있는 관측값을 원으로 표시하고, 잡음이 없는 함수는 파란색으로 표시합니다.
Now, let’s specify a GP prior over the latent noise-free function, f(x)∼GP(m,k). We’ll use a mean function m(x)=0, and an RBF covariance function (kernel)
이제 잠재 잡음 없는 함수 f(x)∼GP(m,k)보다 먼저 GP를 지정해 보겠습니다. 평균 함수 m(x)=0과 RBF 공분산 함수(커널)를 사용하겠습니다.

mean = np.zeros(test_x.shape[0])
cov = d2l.rbfkernel(test_x, test_x, ls=0.2)위의 코드는 평균과 공분산 행렬을 계산하는 부분입니다. 이 코드는 Gaussian Process 모델에서 확률 분포를 나타내는 데 사용됩니다. 코드의 각 부분에 대한 설명은 다음과 같습니다:
- mean = np.zeros(test_x.shape[0]): 이 줄은 mean 변수를 생성하고, 이 변수를 테스트 데이터 포인트 수와 같은 길이의 제로 벡터로 초기화합니다. 이 벡터는 Gaussian Process 모델의 평균을 나타냅니다. 여기서 test_x의 shape[0]은 테스트 데이터 포인트의 수를 나타냅니다.
- cov = d2l.rbfkernel(test_x, test_x, ls=0.2): 이 줄은 d2l.rbfkernel 함수를 사용하여 테스트 데이터 포인트 간의 공분산 행렬(cov)을 계산합니다. RBF (Radial Basis Function) 커널을 사용하여 계산하며, ls 매개변수는 커널의 길이 스케일을 나타냅니다. 이 커널은 Gaussian Process 모델에서 관측치 간의 상관 관계를 나타냅니다.
결과적으로, mean 변수는 테스트 데이터 포인트에 대한 평균을 나타내고, cov 변수는 테스트 데이터 포인트 간의 공분산을 나타냅니다. 이러한 정보는 Gaussian Process 모델을 구축하고 예측을 수행하는 데 사용됩니다.
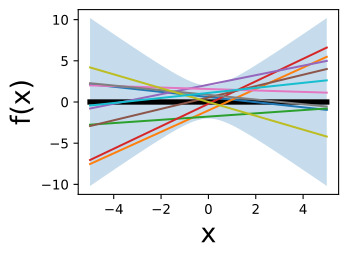
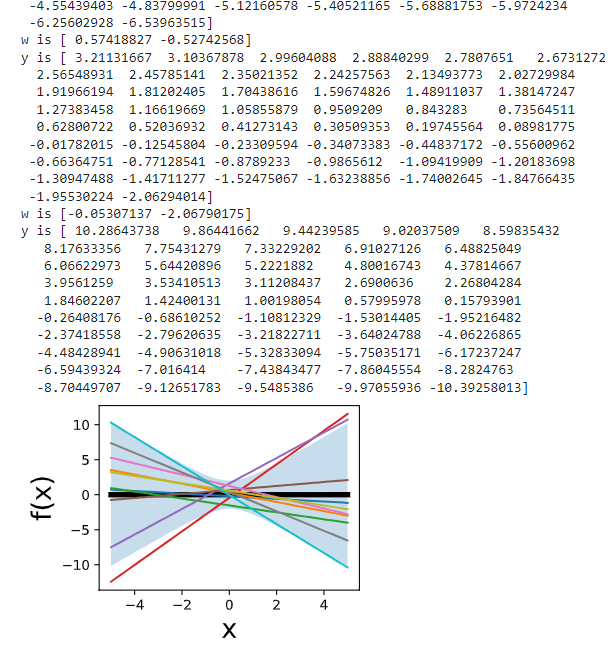
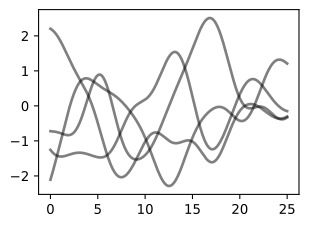
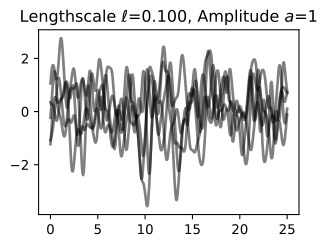
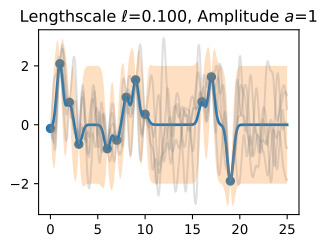
We have started with a length-scale of 0.2. Before we fit the data, it is important to consider whether we have specified a reasonable prior. Let’s visualize some sample functions from this prior, as well as the 95% credible set (we believe there’s a 95% chance that the true function is within this region).
우리는 길이 척도 0.2로 시작했습니다. 데이터를 피팅하기 전에 합리적인 사전 설정을 지정했는지 고려하는 것이 중요합니다. 이전의 일부 샘플 함수와 95% 신뢰할 수 있는 집합을 시각화해 보겠습니다(우리는 실제 함수가 이 영역 내에 있을 확률이 95%라고 믿습니다).
prior_samples = np.random.multivariate_normal(mean=mean, cov=cov, size=5)
d2l.plt.plot(test_x, prior_samples.T, color='black', alpha=0.5)
d2l.plt.plot(test_x, mean, linewidth=2.)
d2l.plt.fill_between(test_x, mean - 2 * np.diag(cov), mean + 2 * np.diag(cov),
alpha=0.25)
d2l.plt.show()위의 코드는 Gaussian Process의 사전 분포를 시각화하기 위한 파이썬 코드입니다. 코드의 각 부분에 대한 설명은 다음과 같습니다:
- prior_samples = np.random.multivariate_normal(mean=mean, cov=cov, size=5): 이 줄은 np.random.multivariate_normal 함수를 사용하여 Gaussian Process의 사전 분포에서 무작위로 샘플을 생성합니다. 이 샘플은 mean 벡터와 cov 공분산 행렬을 기반으로 생성되며, size=5로 설정하여 5개의 샘플을 생성합니다.
- d2l.plt.plot(test_x, prior_samples.T, color='black', alpha=0.5): 이 줄은 이전에 생성한 사전 샘플을 시각화합니다. test_x를 x 축으로 하고, 각 샘플을 선 그래프로 표시합니다. color='black'로 설정하여 검은색으로 그림과 alpha=0.5로 설정하여 투명도를 조절합니다.
- d2l.plt.plot(test_x, mean, linewidth=2.): 이 줄은 Gaussian Process의 평균을 시각화합니다. test_x를 x 축으로 하고 mean을 y 축으로 하는 선 그래프를 그립니다. linewidth=2.로 설정하여 선의 두께를 조절합니다.
- d2l.plt.fill_between(test_x, mean - 2 * np.diag(cov), mean + 2 * np.diag(cov), alpha=0.25): 이 줄은 Gaussian Process의 신뢰 구간을 시각화합니다. test_x 범위에서 mean - 2 * np.diag(cov)와 mean + 2 * np.diag(cov) 사이를 채우는 영역을 그립니다. 이 영역은 95% 신뢰 구간을 나타내며, alpha=0.25로 설정하여 투명도를 조절합니다.
- d2l.plt.show(): 이 줄은 그래프를 화면에 표시합니다.
이 코드는 Gaussian Process의 사전 분포를 시각화하여 모델의 예측의 불확실성을 표현합니다. 사전 샘플, 평균 및 신뢰 구간을 통해 모델이 데이터에 대해 어떤 예측을 수행할 수 있는지와 해당 예측의 불확실성을 이해하는 데 도움이 됩니다.

Do these samples look reasonable? Are the high-level properties of the functions aligned with the type of data we are trying to model?
이 샘플이 합리적으로 보입니까? 함수의 상위 수준 속성이 우리가 모델링하려는 데이터 유형과 일치합니까?
Now let’s form the mean and variance of the posterior predictive distribution at any arbitrary test point x∗.
이제 임의의 테스트 지점 x*에서 사후 예측 분포의 평균과 분산을 만들어 보겠습니다.

Before we make predictions, we should learn our kernel hyperparameters θ and noise variance σ**2. Let’s initialize our length-scale at 0.75, as our prior functions looked too quickly varying compared to the data we are fitting. We’ll also guess a noise standard deviation σ of 0.75.
예측을 하기 전에 커널 하이퍼파라미터 θ와 노이즈 분산 σ**2를 배워야 합니다. 이전 함수가 피팅 중인 데이터에 비해 너무 빠르게 변하는 것처럼 보이므로 길이 척도를 0.75로 초기화하겠습니다. 또한 잡음 표준편차 σ를 0.75로 추측하겠습니다.
In order to learn these parameters, we will maximize the marginal likelihood with respect to these parameters.
이러한 매개변수를 학습하기 위해 이러한 매개변수에 대한 한계우도를 최대화하겠습니다.

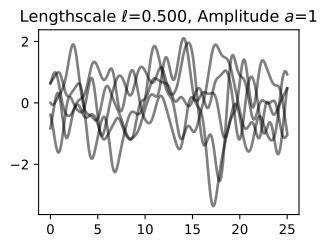
Perhaps our prior functions were too quickly varying. Let’s guess a length-scale of 0.4. We’ll also guess a noise standard deviation of 0.75. These are simply hyperparameter initializations — we will learn these parameters from the marginal likelihood.
아마도 우리의 이전 기능이 너무 빠르게 변화했을 수도 있습니다. 길이 척도를 0.4로 가정해 보겠습니다. 또한 잡음 표준편차를 0.75로 추측하겠습니다. 이것은 단순히 하이퍼파라미터 초기화입니다. 우리는 이러한 매개변수를 한계 가능성으로부터 학습할 것입니다.
ell_est = 0.4
post_sig_est = 0.5
def neg_MLL(pars):
K = d2l.rbfkernel(train_x, train_x, ls=pars[0])
kernel_term = -0.5 * train_y @ \
np.linalg.inv(K + pars[1] ** 2 * np.eye(train_x.shape[0])) @ train_y
logdet = -0.5 * np.log(np.linalg.det(K + pars[1] ** 2 * \
np.eye(train_x.shape[0])))
const = -train_x.shape[0] / 2. * np.log(2 * np.pi)
return -(kernel_term + logdet + const)
learned_hypers = optimize.minimize(neg_MLL, x0=np.array([ell_est,post_sig_est]),
bounds=((0.01, 10.), (0.01, 10.)))
ell = learned_hypers.x[0]
post_sig_est = learned_hypers.x[1]위의 코드는 Gaussian Process 모델의 하이퍼파라미터(길이 스케일과 노이즈 수준)를 최적화하기 위한 파이썬 코드입니다. 코드의 각 부분에 대한 설명은 다음과 같습니다:
- ell_est = 0.4 및 post_sig_est = 0.5: 이 두 줄은 Gaussian Process 모델의 초기 추정치를 설정합니다. ell_est는 길이 스케일을 나타내고, post_sig_est는 노이즈 수준을 나타냅니다.
- def neg_MLL(pars):: 이 줄은 Gaussian Process 모델의 로그 마이너스 마지널 우도(Log Marginal Likelihood)를 계산하는 사용자 지정 함수 neg_MLL을 정의합니다. 이 함수는 하이퍼파라미터 pars를 입력으로 받습니다.
- K = d2l.rbfkernel(train_x, train_x, ls=pars[0]): 이 줄은 pars[0] 값을 사용하여 길이 스케일을 설정하고, RBF 커널을 계산합니다. train_x 간의 커널 행렬 K를 생성합니다.
- kernel_term = -0.5 * train_y @ np.linalg.inv(K + pars[1] ** 2 * np.eye(train_x.shape[0])) @ train_y: 이 줄은 커널 기반 항을 계산합니다. 이 항은 데이터 포인트의 관측치 train_y를 사용하여 계산되며, 커널 행렬 K와 노이즈의 분산을 고려합니다.
- logdet = -0.5 * np.log(np.linalg.det(K + pars[1] ** 2 * np.eye(train_x.shape[0]))): 이 줄은 로그 행렬식(log determinant)을 계산합니다. 로그 행렬식은 Gaussian Process 모델의 복잡성을 나타내며, 커널 행렬 K와 노이즈의 분산을 고려합니다.
- const = -train_x.shape[0] / 2. * np.log(2 * np.pi): 이 줄은 상수항을 계산합니다. 이 항은 데이터 포인트의 수와 관련이 있으며, Gaussian Process 모델의 복잡성을 나타냅니다.
- return -(kernel_term + logdet + const): 이 줄은 로그 마이너스 마지널 우도(negative log marginal likelihood)를 반환합니다. 이 값은 하이퍼파라미터를 조정하여 최소화하려는 목표 함수로 사용됩니다.
- learned_hypers = optimize.minimize(neg_MLL, x0=np.array([ell_est,post_sig_est]), bounds=((0.01, 10.), (0.01, 10.))): 이 줄은 목표 함수인 neg_MLL를 최소화하여 하이퍼파라미터를 학습하는 과정을 수행합니다. 초기 추정치로 ell_est와 post_sig_est를 사용하고, 각 하이퍼파라미터의 최적 값을 찾기 위해 optimize.minimize 함수를 사용합니다. bounds 매개변수를 사용하여 각 하이퍼파라미터의 최적화 범위를 지정합니다.
- ell = learned_hypers.x[0]와 post_sig_est = learned_hypers.x[1]: 이 두 줄은 최적화된 하이퍼파라미터 값을 추출합니다. 최적 길이 스케일은 ell 변수에 저장되고, 최적 노이즈 수준은 post_sig_est 변수에 저장됩니다.
이 코드는 Gaussian Process 모델의 하이퍼파라미터를 최적화하여 모델의 예측을 더 정확하게 조정하고 더 좋은 성능을 얻는 데 사용됩니다. 최적화된 하이퍼파라미터는 모델의 복잡성 및 예측의 정확성을 조절하는 데 중요합니다.
In this instance, we learn a length-scale of 0.299, and a noise standard deviation of 0.24. Note that the learned noise is extremely close to the true noise, which helps indicate that our GP is a very well-specified to this problem.
이 경우 길이 척도는 0.299, 잡음 표준 편차는 0.24를 학습합니다. 학습된 잡음은 실제 잡음과 매우 유사하므로 GP가 이 문제에 대해 매우 잘 지정되어 있음을 나타내는 데 도움이 됩니다.
In general, it is crucial to put careful thought into selecting the kernel and initializing the hyperparameters. While marginal likelihood optimization can be relatively robust to initialization, it is not immune to poor initializations. Try running the above script with a variety of initializations and see what results you find.
일반적으로 커널을 선택하고 하이퍼파라미터를 초기화할 때 신중하게 생각하는 것이 중요합니다. 한계 우도 최적화는 초기화에 상대적으로 강력할 수 있지만 잘못된 초기화에는 영향을 받지 않습니다. 다양한 초기화를 사용하여 위 스크립트를 실행해 보고 어떤 결과가 나오는지 확인하세요.
Now, let’s make predictions with these learned hypers.
이제 이러한 학습된 하이퍼를 사용하여 예측을 해보겠습니다.
K_x_xstar = d2l.rbfkernel(train_x, test_x, ls=ell)
K_x_x = d2l.rbfkernel(train_x, train_x, ls=ell)
K_xstar_xstar = d2l.rbfkernel(test_x, test_x, ls=ell)
post_mean = K_x_xstar.T @ np.linalg.inv((K_x_x + \
post_sig_est ** 2 * np.eye(train_x.shape[0]))) @ train_y
post_cov = K_xstar_xstar - K_x_xstar.T @ np.linalg.inv((K_x_x + \
post_sig_est ** 2 * np.eye(train_x.shape[0]))) @ K_x_xstar
lw_bd = post_mean - 2 * np.sqrt(np.diag(post_cov))
up_bd = post_mean + 2 * np.sqrt(np.diag(post_cov))
d2l.plt.scatter(train_x, train_y)
d2l.plt.plot(test_x, test_y, linewidth=2.)
d2l.plt.plot(test_x, post_mean, linewidth=2.)
d2l.plt.fill_between(test_x, lw_bd, up_bd, alpha=0.25)
d2l.plt.legend(['Observed Data', 'True Function', 'Predictive Mean', '95% Set on True Func'])
d2l.plt.show()위의 코드는 Gaussian Process 모델을 사용하여 데이터의 예측을 수행하고 결과를 시각화하는 파이썬 코드입니다. 코드의 각 부분에 대한 설명은 다음과 같습니다:
- K_x_xstar = d2l.rbfkernel(train_x, test_x, ls=ell): 이 줄은 학습 데이터 train_x와 테스트 데이터 test_x 간의 커널 행렬 K_x_xstar를 계산합니다. 이 커널 행렬은 학습 데이터와 테스트 데이터 간의 상관 관계를 나타냅니다.
- K_x_x = d2l.rbfkernel(train_x, train_x, ls=ell): 이 줄은 학습 데이터 train_x 간의 커널 행렬 K_x_x를 계산합니다. 이 커널 행렬은 학습 데이터 포인트 간의 상관 관계를 나타냅니다.
- K_xstar_xstar = d2l.rbfkernel(test_x, test_x, ls=ell): 이 줄은 테스트 데이터 test_x 간의 커널 행렬 K_xstar_xstar를 계산합니다. 이 커널 행렬은 테스트 데이터 포인트 간의 상관 관계를 나타냅니다.
- post_mean = K_x_xstar.T @ np.linalg.inv((K_x_x + post_sig_est ** 2 * np.eye(train_x.shape[0]))) @ train_y: 이 줄은 예측 평균을 계산합니다. 예측 평균은 테스트 데이터와 학습 데이터 간의 상관 관계를 고려하여 계산되며, train_y는 학습 데이터의 관측치입니다.
- post_cov = K_xstar_xstar - K_x_xstar.T @ np.linalg.inv((K_x_x + post_sig_est ** 2 * np.eye(train_x.shape[0]))) @ K_x_xstar: 이 줄은 예측 공분산을 계산합니다. 예측 공분산은 테스트 데이터 간의 상관 관계를 고려하여 계산되며, 모델의 불확실성을 나타냅니다.
- lw_bd = post_mean - 2 * np.sqrt(np.diag(post_cov))와 up_bd = post_mean + 2 * np.sqrt(np.diag(post_cov)): 이 두 줄은 예측 공분산을 기반으로 95% 신뢰 구간을 계산합니다. lw_bd는 신뢰 구간의 하한을 나타내고, up_bd는 신뢰 구간의 상한을 나타냅니다.
- d2l.plt.scatter(train_x, train_y): 이 줄은 학습 데이터를 산점도로 시각화합니다.
- d2l.plt.plot(test_x, test_y, linewidth=2.): 이 줄은 테스트 데이터에 대한 실제 함수를 그립니다.
- d2l.plt.plot(test_x, post_mean, linewidth=2.): 이 줄은 예측 평균을 그립니다.
- d2l.plt.fill_between(test_x, lw_bd, up_bd, alpha=0.25): 이 줄은 95% 신뢰 구간을 시각화합니다. lw_bd와 up_bd 사이를 채우는 영역을 그립니다.
- d2l.plt.legend(['Observed Data', 'True Function', 'Predictive Mean', '95% Set on True Func']): 이 줄은 그래프에 범례를 추가합니다.
- d2l.plt.show(): 이 줄은 그래프를 화면에 표시합니다.
이 코드는 Gaussian Process 모델을 사용하여 데이터의 예측 평균과 신뢰 구간을 계산하고, 학습 데이터, 실제 함수, 예측 평균 및 신뢰 구간을 함께 시각화하여 모델의 예측을 평가합니다.
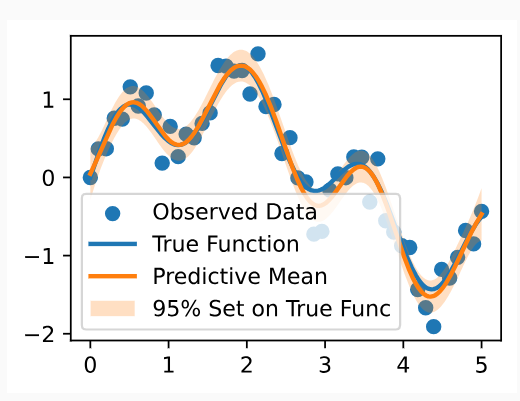
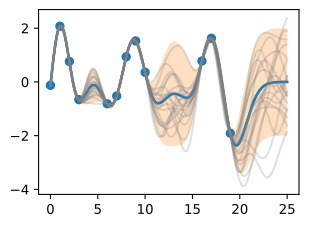
We see the posterior mean in orange almost perfectly matches the true noise free function! Note that the 95% credible set we are showing is for the latent noise free (true) function, and not the data points. We see that this credible set entirely contains the true function, and does not seem overly wide or narrow. We would not want nor expect it to contain the data points. If we wish to have a credible set for the observations, we should compute
주황색의 사후 평균이 실제 노이즈 없는 기능과 거의 완벽하게 일치하는 것을 볼 수 있습니다! 우리가 보여주고 있는 95% 신뢰할 수 있는 세트는 데이터 포인트가 아닌 잠재 잡음 없는(true) 기능에 대한 것입니다. 우리는 이 신뢰할 수 있는 집합이 진정한 기능을 완전히 포함하고 있으며 지나치게 넓거나 좁아 보이지 않는다는 것을 알 수 있습니다. 우리는 데이터 포인트가 포함되는 것을 원하지도 기대하지도 않습니다. 관측값에 대해 신뢰할 수 있는 세트를 갖고 싶다면 다음을 계산해야 합니다.
lw_bd_observed = post_mean - 2 * np.sqrt(np.diag(post_cov) + post_sig_est ** 2)
up_bd_observed = post_mean + 2 * np.sqrt(np.diag(post_cov) + post_sig_est ** 2)위의 코드는 관찰된 데이터 포인트에 대한 95% 신뢰 구간을 계산하는 부분입니다. 코드의 각 부분에 대한 설명은 다음과 같습니다:
- lw_bd_observed = post_mean - 2 * np.sqrt(np.diag(post_cov) + post_sig_est ** 2): 이 줄은 하한(낮은 경계) lw_bd_observed를 계산합니다. 이 하한은 예측 평균인 post_mean에서 예측 공분산 행렬 post_cov의 대각 요소에 post_sig_est의 제곱을 더한 값에서 2배의 표준 편차를 뺀 것입니다. 이를 통해 관찰된 데이터 포인트의 예측에 대한 하한을 계산합니다.
- up_bd_observed = post_mean + 2 * np.sqrt(np.diag(post_cov) + post_sig_est ** 2): 이 줄은 상한(높은 경계) up_bd_observed를 계산합니다. 이 상한은 예측 평균인 post_mean에서 예측 공분산 행렬 post_cov의 대각 요소에 post_sig_est의 제곱을 더한 값에서 2배의 표준 편차를 더한 것입니다. 이를 통해 관찰된 데이터 포인트의 예측에 대한 상한을 계산합니다.
이렇게 계산된 하한과 상한을 사용하면 관찰된 데이터 포인트에 대한 예측의 신뢰 구간을 나타낼 수 있습니다. 이 구간은 모델의 예측의 불확실성을 표현하며, 95%의 신뢰 수준에서 관찰된 데이터 포인트가 포함될 것으로 예상됩니다.
There are two sources of uncertainty, epistemic uncertainty, representing reducible uncertainty, and aleatoric or irreducible uncertainty. The epistemic uncertainty here represents uncertainty about the true values of the noise free function. This uncertainty should grow as we move away from the data points, as away from the data there are a greater variety of function values consistent with our data. As we observe more and more data, our beliefs about the true function become more confident, and the epistemic uncertainty disappears. The aleatoric uncertainty in this instance is the observation noise, since the data are given to us with this noise, and it cannot be reduced.
불확실성에는 두 가지 원인이 있는데, 환원 가능한 불확실성을 나타내는 인식론적 불확실성과 우발적 또는 환원 불가능한 불확실성이 있습니다. 여기서 인식론적 불확실성은 잡음 없는 함수의 실제 값에 대한 불확실성을 나타냅니다. 이러한 불확실성은 데이터 포인트에서 멀어질수록 커집니다. 데이터에서 멀어지면 데이터와 일치하는 더 다양한 함수 값이 있기 때문입니다. 점점 더 많은 데이터를 관찰할수록 실제 함수에 대한 우리의 믿음은 더욱 확신을 갖게 되고 인식론적 불확실성은 사라집니다. 이 경우의 우연적 불확실성은 관찰 잡음입니다. 왜냐하면 데이터가 이 잡음과 함께 우리에게 제공되고 이를 줄일 수 없기 때문입니다.
The epistemic uncertainty in the data is captured by variance of the latent noise free function np.diag(post_cov). The aleatoric uncertainty is captured by the noise variance post_sig_est**2.
데이터의 인식론적 불확실성은 잠재 잡음 없는 함수 np.diag(post_cov)의 분산으로 포착됩니다. 우연적 불확실성은 post_sig_est**2 잡음 분산으로 포착됩니다.
Unfortunately, people are often careless about how they represent uncertainty, with many papers showing error bars that are completely undefined, no clear sense of whether we are visualizing epistemic or aleatoric uncertainty or both, and confusing noise variances with noise standard deviations, standard deviations with standard errors, confidence intervals with credible sets, and so on. Without being precise about what the uncertainty represents, it is essentially meaningless.
불행하게도 사람들은 종종 불확실성을 어떻게 표현하는지에 대해 부주의합니다. 많은 논문에서는 완전히 정의되지 않은 오류 막대가 표시되고, 인식론적 불확실성이나 우연적 불확실성 또는 둘 다를 시각화하고 있는지에 대한 명확한 감각이 없으며, 잡음 분산을 잡음 표준 편차와, 표준 편차를 잡음 표준 편차와 혼동합니다. 표준 오류, 신뢰할 수 있는 세트의 신뢰 구간 등. 불확실성이 무엇을 나타내는지 정확하게 밝히지 않으면 본질적으로 의미가 없습니다.
In the spirit of playing close attention to what our uncertainty represents, it is crucial to note that we are taking two times the square root of our variance estimate for the noise free function. Since our predictive distribution is Gaussian, this quantity enables us to form a 95% credible set, representing our beliefs about the interval which is 95% likely to contain the ground truth function. The noise variance is living on a completely different scale, and is much less interpretable.
불확실성이 무엇을 나타내는지에 세심한 주의를 기울이는 정신으로, 잡음 없는 함수에 대한 분산 추정치의 제곱근의 두 배를 취한다는 점에 유의하는 것이 중요합니다. 예측 분포는 가우스 분포이므로 이 수량을 통해 95% 신뢰할 수 있는 세트를 형성할 수 있으며, 이는 정답 함수를 포함할 가능성이 95%인 구간에 대한 우리의 믿음을 나타냅니다. 노이즈 분산은 완전히 다른 규모로 존재하며 해석하기가 훨씬 어렵습니다.
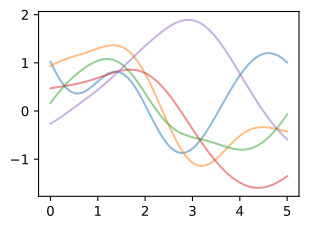
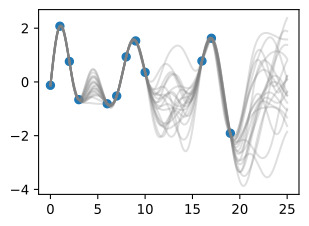
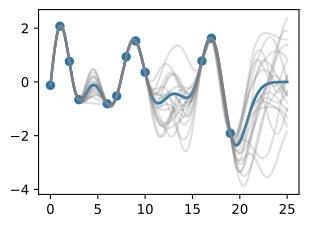
Finally, let’s take a look at 20 posterior samples. These samples tell us what types of functions we believe might fit our data, a posteriori.
마지막으로 20개의 후방 샘플을 살펴보겠습니다. 이 샘플은 어떤 유형의 함수가 데이터에 적합하다고 생각하는지 사후적으로 알려줍니다.
post_samples = np.random.multivariate_normal(post_mean, post_cov, size=20)
d2l.plt.scatter(train_x, train_y)
d2l.plt.plot(test_x, test_y, linewidth=2.)
d2l.plt.plot(test_x, post_mean, linewidth=2.)
d2l.plt.plot(test_x, post_samples.T, color='gray', alpha=0.25)
d2l.plt.fill_between(test_x, lw_bd, up_bd, alpha=0.25)
plt.legend(['Observed Data', 'True Function', 'Predictive Mean', 'Posterior Samples'])
d2l.plt.show()위의 코드는 Gaussian Process 모델을 사용하여 데이터의 예측을 시각화하는 파이썬 코드입니다. 코드의 각 부분에 대한 설명은 다음과 같습니다:
- post_samples = np.random.multivariate_normal(post_mean, post_cov, size=20): 이 줄은 post_mean과 post_cov를 기반으로 20개의 사후 샘플을 생성합니다. 이 샘플은 Gaussian Process 모델의 예측 분포에서 무작위로 추출된 것으로, 모델의 불확실성을 반영합니다.
- d2l.plt.scatter(train_x, train_y): 이 줄은 학습 데이터를 산점도로 시각화합니다.
- d2l.plt.plot(test_x, test_y, linewidth=2.): 이 줄은 테스트 데이터에 대한 실제 함수를 그립니다.
- d2l.plt.plot(test_x, post_mean, linewidth=2.): 이 줄은 예측 평균을 그립니다.
- d2l.plt.plot(test_x, post_samples.T, color='gray', alpha=0.25): 이 줄은 사후 샘플을 그립니다. 사후 샘플은 회색으로 표시되며, 투명도가 조절된 alpha=0.25로 설정되어 있습니다. 이를 통해 모델의 불확실성을 시각화합니다.
- d2l.plt.fill_between(test_x, lw_bd, up_bd, alpha=0.25): 이 줄은 95% 신뢰 구간을 시각화합니다. lw_bd와 up_bd 사이를 채우는 영역을 그립니다.
- plt.legend(['Observed Data', 'True Function', 'Predictive Mean', 'Posterior Samples']): 이 줄은 그래프에 범례를 추가합니다. 범례는 'Observed Data' (관찰된 데이터), 'True Function' (실제 함수), 'Predictive Mean' (예측 평균), 'Posterior Samples' (사후 샘플)을 표시합니다.
- d2l.plt.show(): 이 줄은 그래프를 화면에 표시합니다.
이 코드는 Gaussian Process 모델을 사용하여 데이터의 예측을 시각화하고, 학습 데이터, 실제 함수, 예측 평균, 사후 샘플 및 신뢰 구간을 함께 시각화하여 모델의 예측과 불확실성을 평가합니다. 사후 샘플 및 신뢰 구간은 모델의 예측 분포를 더 자세히 이해하는 데 도움이 됩니다.
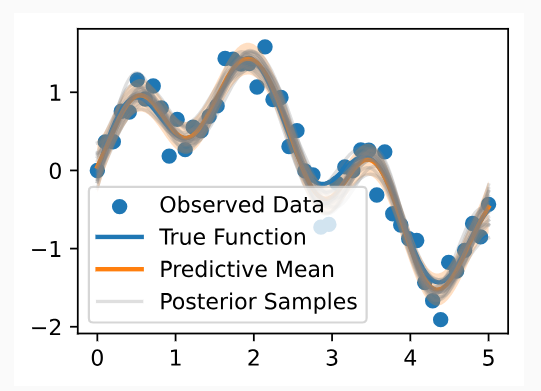
In basic regression applications, it is most common to use the posterior predictive mean and standard deviation as a point predictor and metric for uncertainty, respectively. In more advanced applications, such as Bayesian optimization with Monte Carlo acquisition functions, or Gaussian processes for model-based RL, it often necessary to take posterior samples. However, even if not strictly required in the basic applications, these samples give us more intuition about the fit we have for the data, and are often useful to include in visualizations.
기본 회귀 분석에서는 사후 예측 평균과 표준 편차를 각각 점 예측 변수와 불확실성 측정 기준으로 사용하는 것이 가장 일반적입니다. Monte Carlo 획득 기능을 사용한 베이지안 최적화 또는 모델 기반 RL을 위한 가우스 프로세스와 같은 고급 애플리케이션에서는 종종 사후 샘플을 가져와야 하는 경우가 있습니다. 그러나 기본 응용 프로그램에서 엄격하게 요구되지 않더라도 이러한 샘플은 데이터에 대한 적합성에 대해 더 많은 직관을 제공하며 종종 시각화에 포함하는 데 유용합니다.
18.3.5. Making Life Easy with GPyTorch
As we have seen, it is actually pretty easy to implement basic Gaussian process regression entirely from scratch. However, as soon as we want to explore a variety of kernel choices, consider approximate inference (which is needed even for classification), combine GPs with neural networks, or even have a dataset larger than about 10,000 points, then an implementation from scratch becomes unwieldy and cumbersome. Some of the most effective methods for scalable GP inference, such as SKI (also known as KISS-GP), can require hundreds of lines of code implementing advanced numerical linear algebra routines.
우리가 본 것처럼 기본 가우스 프로세스 회귀를 처음부터 완전히 구현하는 것은 실제로 매우 쉽습니다. 그러나 다양한 커널 선택을 탐색하고, 대략적인 추론(분류에도 필요함)을 고려하고, GP를 신경망과 결합하거나, 심지어 약 10,000포인트보다 큰 데이터 세트를 갖고자 하는 경우, 처음부터 다시 구현해야 합니다. 다루기 힘들고 번거롭다. SKI(KISS-GP라고도 함)와 같은 확장 가능한 GP 추론을 위한 가장 효과적인 방법 중 일부에는 고급 수치 선형 대수 루틴을 구현하는 수백 줄의 코드가 필요할 수 있습니다.
In these cases, the GPyTorch library will make our lives a lot easier. We’ll be discussing GPyTorch more in future notebooks on Gaussian process numerics, and advanced methods. The GPyTorch library contains many examples. To get a feel for the package, we will walk through the simple regression example, showing how it can be adapted to reproduce our above results using GPyTorch. This may seem like a lot of code to simply reproduce the basic regression above, and in a sense, it is. But we can immediately use a variety of kernels, scalable inference techniques, and approximate inference, by only changing a few lines of code from below, instead of writing potentially thousands of lines of new code.
이러한 경우 GPyTorch 라이브러리는 우리 삶을 훨씬 쉽게 만들어 줄 것입니다. 우리는 가우스 프로세스 수치 및 고급 방법에 대한 향후 노트북에서 GPyTorch에 대해 더 많이 논의할 것입니다. GPyTorch 라이브러리에는 많은 예제가 포함되어 있습니다. 패키지에 대한 느낌을 얻기 위해 간단한 회귀 예제를 살펴보고 GPyTorch를 사용하여 위 결과를 재현하도록 어떻게 적용할 수 있는지 보여드리겠습니다. 이는 위의 기본 회귀를 간단히 재현하기에는 많은 코드처럼 보일 수 있으며 어떤 의미에서는 그렇습니다. 그러나 잠재적으로 수천 줄의 새로운 코드를 작성하는 대신 아래에서 몇 줄의 코드만 변경하면 다양한 커널, 확장 가능한 추론 기술 및 대략적인 추론을 즉시 사용할 수 있습니다.
# First let's convert our data into tensors for use with PyTorch
train_x = torch.tensor(train_x)
train_y = torch.tensor(train_y)
test_y = torch.tensor(test_y)
# We are using exact GP inference with a zero mean and RBF kernel
class ExactGPModel(gpytorch.models.ExactGP):
def __init__(self, train_x, train_y, likelihood):
super(ExactGPModel, self).__init__(train_x, train_y, likelihood)
self.mean_module = gpytorch.means.ZeroMean()
self.covar_module = gpytorch.kernels.ScaleKernel(
gpytorch.kernels.RBFKernel())
def forward(self, x):
mean_x = self.mean_module(x)
covar_x = self.covar_module(x)
return gpytorch.distributions.MultivariateNormal(mean_x, covar_x)위의 코드는 PyTorch와 GPyTorch를 사용하여 정확한 Gaussian Process(GP) 모델을 정의하는 파트입니다. 코드의 각 부분에 대한 설명은 다음과 같습니다:
- 데이터를 PyTorch Tensor로 변환하는 부분:
- train_x = torch.tensor(train_x): 학습 데이터 train_x를 PyTorch Tensor로 변환합니다.
- train_y = torch.tensor(train_y): 학습 데이터의 관측치 train_y를 PyTorch Tensor로 변환합니다.
- test_y = torch.tensor(test_y): 테스트 데이터의 관측치 test_y를 PyTorch Tensor로 변환합니다. (주의: 테스트 데이터의 test_x는 변환되지 않았으므로 주의가 필요합니다.)
- 정확한 GP 모델 정의:
- class ExactGPModel(gpytorch.models.ExactGP):: ExactGP 클래스를 상속받는 새로운 GP 모델 클래스 ExactGPModel을 정의합니다. 이 클래스는 GPyTorch를 사용하여 정확한 GP 추론을 수행합니다.
- def __init__(self, train_x, train_y, likelihood):: 모델의 생성자 메서드에서 학습 데이터 train_x, 관측치 train_y, 및 likelihood를 입력으로 받습니다.
- super(ExactGPModel, self).__init__(train_x, train_y, likelihood): 상위 클래스인 ExactGP의 생성자를 호출하여 모델을 초기화합니다.
- self.mean_module = gpytorch.means.ZeroMean(): 모델의 평균 함수를 Zero Mean으로 설정합니다. 이것은 GP 모델의 평균을 제로로 설정하는 의미입니다.
- self.covar_module = gpytorch.kernels.ScaleKernel(gpytorch.kernels.RBFKernel()): 모델의 공분산 함수를 Scale Kernel과 RBF Kernel의 조합으로 설정합니다. Scale Kernel은 공분산을 스케일링하고, RBF Kernel은 데이터 포인트 간의 상관 관계를 모델링합니다.
- forward 메서드:
- def forward(self, x):: forward 메서드는 GP 모델의 순전파 연산을 정의합니다. 입력으로 x를 받아서 평균과 공분산을 계산하고, 이를 MultivariateNormal 분포로 반환합니다. 이 분포는 GP 모델의 예측 분포를 나타냅니다.
이 코드는 PyTorch와 GPyTorch를 사용하여 정확한 GP 모델을 정의하고, 모델의 평균 및 공분산 함수를 설정합니다. 이 모델을 사용하여 Gaussian Process 추론을 수행할 수 있습니다.
This code block puts the data in the right format for GPyTorch, and specifies that we are using exact inference, as well the mean function (zero) and kernel function (RBF) that we want to use. We can use any other kernel very easily, by calling, for instance, gpytorch.kernels.matern_kernel(), or gpyotrch.kernels.spectral_mixture_kernel(). So far, we have only discussed exact inference, where it is possible to infer a predictive distribution without making any approximations. For Gaussian processes, we can only perform exact inference when we have a Gaussian likelihood; more specifically, when we assume that our observations are generated as a noise-free function represented by a Gaussian process, plus Gaussian noise. In future notebooks, we will consider other settings, such as classification, where we cannot make these assumptions.
이 코드 블록은 GPyTorch에 적합한 형식으로 데이터를 배치하고 정확한 추론을 사용하고 있으며 사용하려는 평균 함수(0) 및 커널 함수(RBF)를 지정합니다. 예를 들어 gpytorch.kernels.matern_kernel() 또는 gpyotrch.kernels.spectral_mixture_kernel()을 호출하여 다른 커널을 매우 쉽게 사용할 수 있습니다. 지금까지 우리는 근사치를 만들지 않고도 예측 분포를 추론할 수 있는 정확한 추론에 대해서만 논의했습니다. 가우스 프로세스의 경우 가우스 우도가 있는 경우에만 정확한 추론을 수행할 수 있습니다. 더 구체적으로 말하면, 관측값이 가우스 프로세스와 가우스 노이즈로 표현되는 노이즈 없는 함수로 생성된다고 가정할 때입니다. 향후 노트북에서는 이러한 가정을 할 수 없는 분류와 같은 다른 설정을 고려할 것입니다.
# Initialize Gaussian likelihood
likelihood = gpytorch.likelihoods.GaussianLikelihood()
model = ExactGPModel(train_x, train_y, likelihood)
training_iter = 50
# Find optimal model hyperparameters
model.train()
likelihood.train()
# Use the adam optimizer, includes GaussianLikelihood parameters
optimizer = torch.optim.Adam(model.parameters(), lr=0.1)
# Set our loss as the negative log GP marginal likelihood
mll = gpytorch.mlls.ExactMarginalLogLikelihood(likelihood, model)위의 코드는 Gaussian Process 모델의 학습을 위한 준비 단계를 수행하고 모델의 하이퍼파라미터를 최적화하기 위한 설정을 포함합니다. 코드의 각 부분에 대한 설명은 다음과 같습니다:
- Gaussian Likelihood 초기화:
- likelihood = gpytorch.likelihoods.GaussianLikelihood(): Gaussian Likelihood 객체를 초기화합니다. 이 객체는 Gaussian Process 모델의 likelihood를 정의하며, 관측치의 노이즈 수준을 모델에 추가합니다.
- 정확한 GP 모델 및 학습 반복 횟수 초기화:
- model = ExactGPModel(train_x, train_y, likelihood): 이전에 정의한 ExactGPModel 클래스를 사용하여 GP 모델을 초기화합니다. 학습 데이터 train_x와 train_y, 그리고 위에서 초기화한 Gaussian Likelihood likelihood를 모델에 전달합니다.
- training_iter = 50: 모델을 학습시키기 위해 반복할 학습 횟수를 설정합니다. 이 경우 50번의 학습 반복을 수행합니다.
- 모델 및 likelihood를 학습 모드로 설정:
- model.train(): GP 모델을 학습 모드로 설정합니다. 이는 모델의 파라미터가 학습됨을 의미합니다.
- likelihood.train(): Gaussian Likelihood를 학습 모드로 설정합니다.
- 옵티마이저 설정:
- optimizer = torch.optim.Adam(model.parameters(), lr=0.1): Adam 옵티마이저를 초기화합니다. 이 옵티마이저는 GP 모델의 파라미터를 최적화하는 데 사용됩니다. model.parameters()를 사용하여 모델의 파라미터를 옵티마이저에 전달하고, 학습률(learning rate)은 lr=0.1로 설정합니다.
- 손실 함수 설정:
- mll = gpytorch.mlls.ExactMarginalLogLikelihood(likelihood, model): 정확한 GP 주변 로그 우도를 계산하는 손실 함수를 설정합니다. 이 손실 함수는 Gaussian Process 모델의 학습에서 사용되며, 모델의 하이퍼파라미터를 최적화하는 데 도움을 줍니다.
이 코드는 GP 모델을 학습하기 위한 초기 설정을 수행하고, 모델의 하이퍼파라미터를 최적화하기 위한 준비를 마칩니다. 학습 반복을 통해 모델을 학습하고 최적의 하이퍼파라미터 값을 찾을 것입니다.
This code block puts the data in the right format for GPyTorch, and specifies that we are using exact inference, as well the mean function (zero) and kernel function (RBF) that we want to use. We can use any other kernel very easily, by calling, for instance, gpytorch.kernels.matern_kernel(), or gpyotrch.kernels.spectral_mixture_kernel(). So far, we have only discussed exact inference, where it is possible to infer a predictive distribution without making any approximations. For Gaussian processes, we can only perform exact inference when we have a Gaussian likelihood; more specifically, when we assume that our observations are generated as a noise-free function represented by a Gaussian process, plus Gaussian noise. In future notebooks, we will consider other settings, such as classification, where we cannot make these assumptions.
이 코드 블록은 GPyTorch에 적합한 형식으로 데이터를 배치하고 정확한 추론을 사용하고 있으며 사용하려는 평균 함수(0) 및 커널 함수(RBF)를 지정합니다. 예를 들어 gpytorch.kernels.matern_kernel() 또는 gpyotrch.kernels.spectral_mixture_kernel()을 호출하여 다른 커널을 매우 쉽게 사용할 수 있습니다. 지금까지 우리는 근사치를 만들지 않고도 예측 분포를 추론할 수 있는 정확한 추론에 대해서만 논의했습니다. 가우스 프로세스의 경우 가우스 우도가 있는 경우에만 정확한 추론을 수행할 수 있습니다. 더 구체적으로 말하면, 관측값이 가우스 프로세스와 가우스 노이즈로 표현되는 노이즈 없는 함수로 생성된다고 가정할 때입니다. 향후 노트북에서는 이러한 가정을 할 수 없는 분류와 같은 다른 설정을 고려할 것입니다.
# Initialize Gaussian likelihood
likelihood = gpytorch.likelihoods.GaussianLikelihood()
model = ExactGPModel(train_x, train_y, likelihood)
training_iter = 50
# Find optimal model hyperparameters
model.train()
likelihood.train()
# Use the adam optimizer, includes GaussianLikelihood parameters
optimizer = torch.optim.Adam(model.parameters(), lr=0.1)
# Set our loss as the negative log GP marginal likelihood
mll = gpytorch.mlls.ExactMarginalLogLikelihood(likelihood, model)위의 코드는 Gaussian Process (GP) 모델을 학습하기 위한 초기 설정 단계를 수행하는 파트입니다. 코드의 각 부분에 대한 설명은 다음과 같습니다:
- Gaussian Likelihood 초기화:
- likelihood = gpytorch.likelihoods.GaussianLikelihood(): Gaussian Likelihood 객체를 초기화합니다. 이 객체는 GP 모델의 likelihood를 정의하며, 관측치의 노이즈 수준을 모델에 추가합니다.
- GP 모델 초기화:
- model = ExactGPModel(train_x, train_y, likelihood): GP 모델을 초기화합니다. 이전에 정의한 ExactGPModel 클래스를 사용하여 모델을 생성합니다. 학습 데이터 train_x와 train_y, 그리고 위에서 초기화한 Gaussian Likelihood likelihood를 모델에 전달합니다. 이 모델은 평균 함수와 공분산 함수를 설정한 정확한 GP 모델입니다.
- 학습 반복 횟수 설정:
- training_iter = 50: 모델을 학습시키기 위해 반복할 학습 횟수를 설정합니다. 이 경우 50번의 학습 반복을 수행합니다.
- 모델 및 likelihood를 학습 모드로 설정:
- model.train(): GP 모델을 학습 모드로 설정합니다. 이것은 모델의 파라미터가 학습됨을 의미합니다.
- likelihood.train(): Gaussian Likelihood를 학습 모드로 설정합니다. likelihood 모델의 파라미터도 학습될 것입니다.
- 옵티마이저 설정:
- optimizer = torch.optim.Adam(model.parameters(), lr=0.1): Adam 옵티마이저를 초기화합니다. 이 옵티마이저는 GP 모델의 파라미터를 최적화하는 데 사용됩니다. model.parameters()를 사용하여 모델의 파라미터를 옵티마이저에 전달하고, 학습률(learning rate)은 lr=0.1로 설정합니다.
- 손실 함수 설정:
- mll = gpytorch.mlls.ExactMarginalLogLikelihood(likelihood, model): 정확한 GP 주변 로그 우도를 계산하는 손실 함수를 설정합니다. 이 손실 함수는 Gaussian Process 모델의 학습에서 사용되며, 모델의 하이퍼파라미터를 최적화하는 데 도움을 줍니다.
이 코드는 GP 모델을 학습하기 위한 초기 설정을 수행하고, 모델의 하이퍼파라미터를 최적화하기 위한 준비를 마칩니다. 학습 반복을 통해 모델을 학습하고 최적의 하이퍼파라미터 값을 찾을 것입니다.
Here, we explicitly specify the likelihood we want to use (Gaussian), the objective we will use for training kernel hyperparameters (here, the marginal likelihood), and the procedure we we want to use for optimizing that objective (in this case, Adam). We note that while we are using Adam, which is a “stochastic” optimizer, in this case, it is full-batch Adam. Because the marginal likelihood does not factorize over data instances, we cannot use an optimizer over “mini-batches” of data and be guaranteed convergence. Other optimizers, such as L-BFGS, are also supported by GPyTorch. Unlike in standard deep learning, doing a good job of optimizing the marginal likelihood corresponds strongly with good generalization, which often inclines us towards powerful optimizers like L-BFGS, assuming they are not prohibitively expensive.
여기서는 사용하려는 우도(가우시안), 커널 하이퍼파라미터 훈련에 사용할 목표(여기서는 한계 우도), 해당 목표를 최적화하기 위해 사용할 절차(이 경우 Adam)를 명시적으로 지정합니다. ). 우리는 "확률적" 최적화 프로그램인 Adam을 사용하고 있지만 이 경우에는 전체 배치 Adam이라는 점에 주목합니다. 한계 가능성은 데이터 인스턴스에 대해 인수분해되지 않기 때문에 데이터의 "미니 배치"에 대해 최적화 프로그램을 사용할 수 없으며 수렴을 보장할 수 없습니다. L-BFGS와 같은 다른 최적화 프로그램도 GPyTorch에서 지원됩니다. 표준 딥러닝과 달리, 한계 우도를 최적화하는 작업을 잘 수행하는 것은 좋은 일반화와 강력하게 일치합니다. 이는 종종 L-BFGS와 같은 강력한 최적화 프로그램이 엄청나게 비싸지 않다고 가정할 때 선호하게 됩니다.
for i in range(training_iter):
# Zero gradients from previous iteration
optimizer.zero_grad()
# Output from model
output = model(train_x)
# Calc loss and backprop gradients
loss = -mll(output, train_y)
loss.backward()
if i % 10 == 0:
print(f'Iter {i+1:d}/{training_iter:d} - Loss: {loss.item():.3f} '
f'squared lengthscale: '
f'{model.covar_module.base_kernel.lengthscale.item():.3f} '
f'noise variance: {model.likelihood.noise.item():.3f}')
optimizer.step()위의 코드는 GP 모델을 학습하기 위한 반복적인 학습 루프를 구현하는 파트입니다. 코드의 각 부분에 대한 설명은 다음과 같습니다:
- for i in range(training_iter):: 학습 반복을 training_iter 횟수만큼 반복합니다. 이는 모델의 파라미터를 최적화하기 위한 학습 과정을 나타냅니다.
- optimizer.zero_grad(): 각 반복에서 이전 반복에서의 그라디언트를 초기화합니다. 이렇게 하면 새로운 그라디언트를 계산할 수 있게 됩니다.
- output = model(train_x): GP 모델을 사용하여 학습 데이터 train_x에 대한 출력을 계산합니다. 이는 GP 모델의 예측을 나타냅니다.
- loss = -mll(output, train_y): 손실 함수를 계산합니다. 여기서는 GP 모델의 예측 output과 실제 학습 데이터의 관측치 train_y를 사용하여 음의 로그 주변 로그 우도를 계산합니다. 이 손실 함수는 GP 모델의 파라미터를 최적화하는 데 사용됩니다.
- loss.backward(): 손실 함수를 사용하여 그라디언트(기울기)를 계산하고, 그라디언트를 모델의 파라미터에 역전파합니다. 이를 통해 파라미터를 업데이트합니다.
- if i % 10 == 0:: 매 10번째 반복마다 아래의 정보를 출력합니다. 이 정보에는 현재 학습 반복 횟수, 손실 값, 커널의 길이 스케일, 및 노이즈 분산이 포함됩니다.
- optimizer.step(): 옵티마이저를 사용하여 모델의 파라미터를 업데이트합니다. 역전파된 그라디언트를 사용하여 모델의 파라미터를 조정하여 손실을 최소화합니다.
이렇게 반복적으로 학습을 수행하면 GP 모델의 파라미터가 최적화되며, 모델은 학습 데이터에 더 잘 맞게 됩니다. 학습 반복 횟수가 증가함에 따라 손실이 감소하고 모델의 파라미터가 조정됩니다.
Iter 1/50 - Loss: 1.000 squared lengthscale: 0.693 noise variance: 0.693
Iter 11/50 - Loss: 0.711 squared lengthscale: 0.490 noise variance: 0.312
Iter 21/50 - Loss: 0.451 squared lengthscale: 0.506 noise variance: 0.127
Iter 31/50 - Loss: 0.330 squared lengthscale: 0.485 noise variance: 0.055
Iter 41/50 - Loss: 0.344 squared lengthscale: 0.472 noise variance: 0.038Here we actually run the optimization procedure, outputting the values of the loss every 10 iterations.
여기에서는 실제로 최적화 절차를 실행하여 10번 반복마다 손실 값을 출력합니다.
# Get into evaluation (predictive posterior) mode
test_x = torch.tensor(test_x)
model.eval()
likelihood.eval()
observed_pred = likelihood(model(test_x))위의 코드는 GP 모델을 평가 모드로 전환하고 테스트 데이터에 대한 예측을 수행하는 부분입니다. 코드의 각 부분에 대한 설명은 다음과 같습니다:
- test_x = torch.tensor(test_x): 테스트 데이터 test_x를 PyTorch Tensor로 변환합니다. 테스트 데이터는 모델이 학습한 데이터가 아니며, 모델이 이 데이터에 대한 예측을 수행할 것입니다.
- model.eval(): GP 모델을 평가 모드로 전환합니다. 모델을 평가 모드로 설정하면 모델의 파라미터는 고정되며, 그라디언트가 계산되지 않습니다. 이 모드에서 모델은 예측을 수행하기 위해 사용됩니다.
- likelihood.eval(): Gaussian Likelihood를 평가 모드로 전환합니다. 마찬가지로 likelihood 모델의 파라미터는 고정되고, 그라디언트가 계산되지 않습니다. 이 모드에서 likelihood 모델은 예측 분포의 노이즈를 정의하는 데 사용됩니다.
- observed_pred = likelihood(model(test_x)): 테스트 데이터 test_x에 대한 예측을 수행합니다. 먼저 GP 모델에 test_x를 입력으로 전달하여 예측값을 계산하고, 그 다음 Gaussian Likelihood를 사용하여 노이즈를 고려한 예측 분포를 얻습니다. 이 결과는 observed_pred에 저장됩니다.
이렇게 평가 모드로 전환된 모델과 likelihood를 사용하여 테스트 데이터에 대한 예측을 수행하고, 예측 분포를 얻게 됩니다. 이 예측 분포를 사용하여 모델의 성능을 평가하거나 시각화하는 데 사용할 수 있습니다.
The above codeblock enables us to make predictions on our test inputs.
위의 코드 블록을 사용하면 테스트 입력에 대해 예측할 수 있습니다.
with torch.no_grad():
# Initialize plot
f, ax = d2l.plt.subplots(1, 1, figsize=(4, 3))
# Get upper and lower bounds for 95\% credible set (in this case, in
# observation space)
lower, upper = observed_pred.confidence_region()
ax.scatter(train_x.numpy(), train_y.numpy())
ax.plot(test_x.numpy(), test_y.numpy(), linewidth=2.)
ax.plot(test_x.numpy(), observed_pred.mean.numpy(), linewidth=2.)
ax.fill_between(test_x.numpy(), lower.numpy(), upper.numpy(), alpha=0.25)
ax.set_ylim([-1.5, 1.5])
ax.legend(['True Function', 'Predictive Mean', 'Observed Data',
'95% Credible Set'])위의 코드는 GP 모델을 사용하여 예측을 수행하고 그 결과를 시각화하는 부분입니다. 코드의 각 부분에 대한 설명은 다음과 같습니다:
- with torch.no_grad():: 이 부분은 PyTorch의 그라디언트 계산을 비활성화하는 torch.no_grad() 컨텍스트를 생성합니다. 이 컨텍스트 내에서는 모델의 예측을 수행할 때 그라디언트가 계산되지 않으므로, 모델이 추론만 수행하게 됩니다.
- f, ax = d2l.plt.subplots(1, 1, figsize=(4, 3)): 그래프를 생성하고 그림을 그릴 축을 설정합니다. d2l.plt.subplots(1, 1, figsize=(4, 3))는 크기가 4x3인 그래프를 생성하고 그림을 그릴 하나의 축을 반환합니다.
- lower, upper = observed_pred.confidence_region(): observed_pred에 저장된 예측 분포를 사용하여 95% 신뢰 구간의 하한과 상한을 얻습니다. 이 구간은 예측 분포를 기반으로 합니다.
- ax.scatter(train_x.numpy(), train_y.numpy()): 학습 데이터를 산점도로 시각화합니다. train_x와 train_y는 학습 데이터의 입력과 관측치입니다.
- ax.plot(test_x.numpy(), test_y.numpy(), linewidth=2.): 실제 함수를 그래프로 그립니다. 이것은 테스트 데이터의 실제 관측치에 해당합니다.
- ax.plot(test_x.numpy(), observed_pred.mean.numpy(), linewidth=2.): GP 모델의 예측 평균을 그래프로 그립니다. 이것은 GP 모델이 예측한 평균 함수입니다.
- ax.fill_between(test_x.numpy(), lower.numpy(), upper.numpy(), alpha=0.25): GP 모델의 예측 신뢰 구간을 그래프로 표시합니다. 이 신뢰 구간은 lower와 upper로 정의되며, 95% 신뢰 구간을 나타냅니다. alpha=0.25는 채우는 영역의 투명도를 설정합니다.
- ax.set_ylim([-1.5, 1.5]): y-축의 범위를 설정합니다. 이것은 그래프의 y-축 범위를 -1.5에서 1.5로 제한합니다.
- ax.legend(...): 그래프에 범례를 추가합니다. 범례에는 'True Function' (실제 함수), 'Predictive Mean' (예측 평균), 'Observed Data' (관찰된 데이터), '95% Credible Set' (95% 신뢰 구간)이 포함됩니다.
이 코드는 GP 모델의 예측과 관측 데이터를 함께 시각화하여 모델의 예측 분포를 평가하고, 모델이 데이터를 어떻게 설명하고 있는지를 시각적으로 확인합니다.
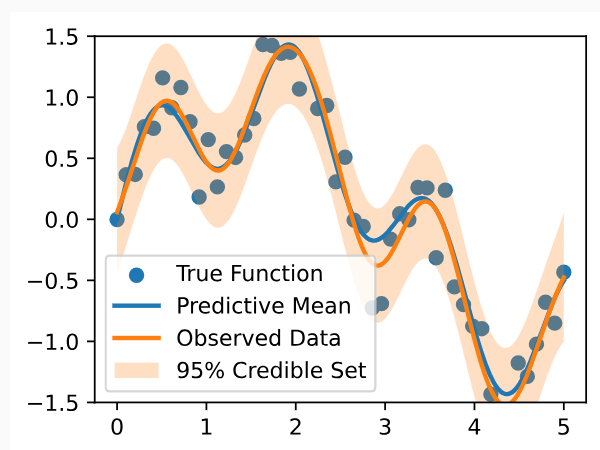
Finally, we plot the fit.
마지막으로 피팅을 플롯합니다.
We see the fits are virtually identical. A few things to note: GPyTorch is working with squared length-scales and observation noise. For example, our learned noise standard deviation in the for scratch code is about 0.283. The noise variance found by GPyTorch is 0.81≈0.2832. In the GPyTorch plot, we also show the credible set in the observation space rather than the latent function space, to demonstrate that they indeed cover the observed datapoints.
우리는 핏이 거의 동일하다는 것을 알 수 있습니다. 몇 가지 참고 사항: GPyTorch는 제곱 길이 척도와 관찰 노이즈를 사용하여 작업합니다. 예를 들어 스크래치 코드에서 학습된 노이즈 표준 편차는 약 0.283입니다. GPyTorch에서 발견한 노이즈 분산은 0.81≒0.2832입니다. GPyTorch 플롯에서는 잠재 함수 공간이 아닌 관찰 공간에 신뢰할 수 있는 세트도 표시하여 실제로 관찰된 데이터 포인트를 포괄한다는 것을 보여줍니다.
18.3.6. Summary
We can combine a Gaussian process prior with data to form a posterior, which we use to make predictions. We can also form a marginal likelihood, which is useful for automatic learning of kernel hyperparameters, which control properties such as the rate of variation of the Gaussian process. The mechanics of forming the posterior and learning kernel hyperparameters for regression are simple, involving about a dozen lines of code. This notebook is a good reference for any reader wanting to quickly get “up and running” with Gaussian processes. We also introduced the GPyTorch library. Although the GPyTorch code for basic regression is relatively long, it can be trivially modified for other kernel functions, or more advanced functionality we will discuss in future notebooks, such as scalable inference, or non-Gaussian likelihoods for classification.
Gaussian process prior 를 데이터와 결합하여 posterior 를 형성하고 이를 예측에 사용할 수 있습니다. 또한 가우스 프로세스의 변동률과 같은 속성을 제어하는 커널 하이퍼파라미터의 자동 학습에 유용한 주변 우도를 형성할 수도 있습니다. 회귀를 위한 사후 및 학습 커널 하이퍼파라미터를 형성하는 메커니즘은 약 12줄의 코드를 포함하여 간단합니다. 이 노트북은 가우스 프로세스를 신속하게 "시작하고 실행"하려는 모든 독자에게 좋은 참고 자료입니다. GPyTorch 라이브러리도 소개했습니다. 기본 회귀를 위한 GPyTorch 코드는 상대적으로 길지만 다른 커널 기능이나 확장 가능한 추론 또는 분류를 위한 비가우시안 가능성과 같은 향후 노트북에서 논의할 고급 기능을 위해 쉽게 수정할 수 있습니다.
18.3.7. Exercises
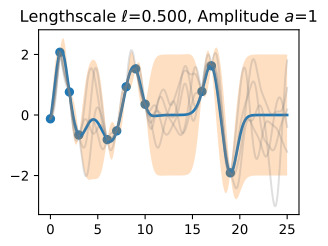
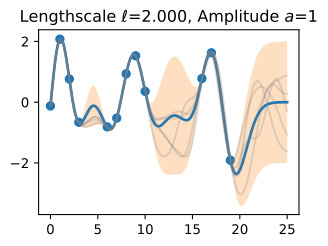
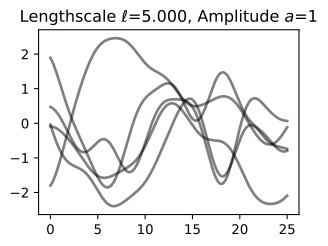
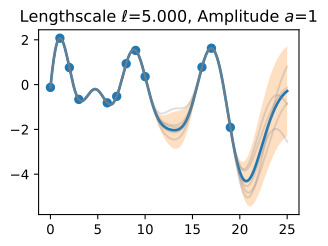
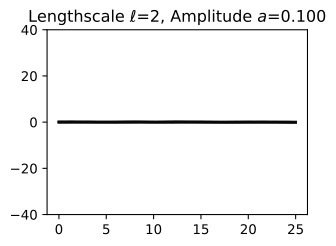
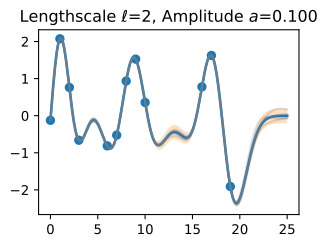
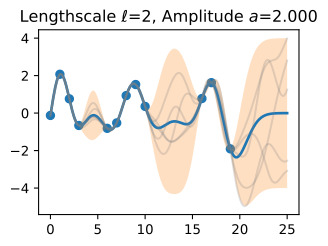
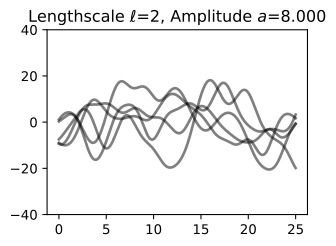
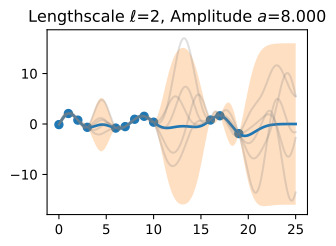
- We have emphasized the importance of learning kernel hyperparameters, and the effect of hyperparameters and kernels on the generalization properties of Gaussian processes. Try skipping the step where we learn hypers, and instead guess a variety of length-scales and noise variances, and check their effect on predictions. What happens when you use a large length-scale? A small length-scale? A large noise variance? A small noise variance?
- We have said that the marginal likelihood is not a convex objective, but that hyperparameters like length-scale and noise variance can be reliably estimated in GP regression. This is generally true — in fact, the marginal likelihood is much better at learning length-scale hyperparameters than conventional approaches in spatial statistics, which involve fitting empirical autocorrelation functions (“covariograms”). Arguably, the biggest contribution from machine learning to Gaussian process research, at least before recent work on scalable inference, was the introduction of the marginal lkelihood for hyperparameter learning.
However, different pairings of even these parameters provide interpretably different plausible explanations for many datasets, leading to local optima in our objective. If we use a large length-scale, then we assume the true underlying function is slowly varying. If the observed data are varying significantly, then the only we can plausibly have a large length-scale is with a large noise-variance. If we use a small length-scale, on the other hand, our fit will be very sensitive to the variations in the data, leaving little room to explain variations with noise (aleatoric uncertainty).
Try seeing if you can find these local optima: initialize with very large length-scale with large noise, and small length-scales with small noise. Do you converge to different solutions?
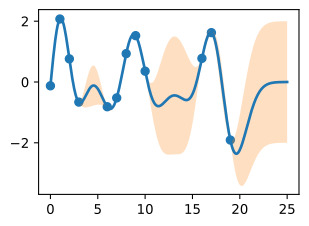
- We have said that a fundamental advantage of Bayesian methods is in naturally representing epistemic uncertainty. In the above example, we cannot fully see the effects of epistemic uncertainty. Try instead to predict with test_x = np.linspace(0, 10, 1000). What happens to the 95% credible set as your predictions move beyond the data? Does it cover the true function in that interval? What happens if you only visualize aleatoric uncertainty in that region?
- Try running the above example, but instead with 10,000, 20,000 and 40,000 training points, and measure the runtimes. How does the training time scale? Alternatively, how do the runtimes scale with the number of test points? Is it different for the predictive mean and the predictive variance? Answer this question both by theoretically working out the training and testing time complexities, and by running the code above with a different number of points.
- Try running the GPyTorch example with different covariance functions, such as the Matern kernel. How do the results change? How about the spectral mixture kernel, found in the GPyTorch library? Are some easier to train the marginal likelihood than others? Are some more valuable for long-range versus short-range predictions?
- In our GPyTorch example, we plotted the predictive distribution including observation noise, while in our “from scratch” example, we only included epistemic uncertainty. Re-do the GPyTorch example, but this time only plotting epistemic uncertainty, and compare to the from-scratch results. Do the predictive distributions now look the same? (They should.)
'Dive into Deep Learning > D2L Gaussian Processes' 카테고리의 다른 글
| D2L - 18.2. Gaussian Process Priors (1) | 2023.09.09 |
|---|---|
| D2L - 18.1. Introduction to Gaussian Processes (0) | 2023.09.09 |
| D2L - 18. Gaussian Processes (0) | 2023.09.09 |