
DECEMBER 5, 2019 BY TOMASZ PTAK
AWS DeepRacer Console updates at re:Invent 2019
AWS DeepRacer Console updates at re:Invent 2019 – AWS DeepRacer Community Blog
As the AWS DeepRacer League finalists are gathering and finding their ways around Las Vegas, the AWS DeepSanta has come to town to bring good news: we’ve all been on the nice list! Last week Jeff Barr announced new features on the AWS blog, he also gave an
blog.deepracing.io
As the AWS DeepRacer League finalists are gathering and finding their ways around Las Vegas, the AWS DeepSanta has come to town to bring good news: we’ve all been on the nice list!
AWS DeepRacer League 결선 진출 자들이 라스 베이거스에서 자신들의 실력을 겨루는 동안 AWS DeepSanta는 새로운 좋은 소식을 전하기 위해 마을로 왔습니다. (우리는 모두 착한 아이로 기록돼 있습니다.)
Last week Jeff Barr announced new features on the AWS blog, he also gave an awesome shout out to us, the AWS DeepRacer Community. Throughout the week we could see changes to underlying packages and we’re tracking what we should be expecting.
지난주 Jeff Barr는 AWS 블로그에서 새로운 기능을 발표했으며 AWS DeepRacer 커뮤니티에도 그 소식을 알렸습니다. 일주일 동안 우리는 기본 패키지의 변경 사항에 대한 소식을 받아 볼 수 있었고 거기에 맞게 우리는 어떻게 해야 할지 계속 확인하고 있습니다.
Overnight the changes described went live in the console. Have a look around and let us know what you think.
지난 밤 사이 콘솔에 그 변화들이 나타나기 시작했습니다. 그 변화들을 한번 살펴 보겠습니다. 여러분들의 의견도 알려 주세요.

Just a quick recap: the three main big changes in the console are:
간략하게 살펴 보면 콘솔에서는 세가지 큰 변화가 있습니다.
- The Garage where you can set up your car with different sensors and network setup,
- ability to run your own tournaments
- training for three types of objectives: time trial, obstacle avoidance or head-to-head racing
Garage에서는 다른 센서들과 함께 여러분의 자동차를 셋업할 수 있고 네트워크 셋업도 가능합니다.
여러분들이 직접 토너먼트를 만들 수 있습니다.
3가지 트레이닝 타입 : time trial, obstacle avoidance (장애물 피하기) or head-to-head racing (다른 자동차와 경주하기)
The Garage
The Garage gives you a couple options including sensors, network topology, action space and updating your car’s look. It’s unclear to me if that is just for the rendered graphic or anything more (interestingly, the shell shown is for single camera regardless of the sensors that you select) :
Garage에는 센서, 네트워크 토폴로지, action space 및 차량 외관 업데이트를 포함한 몇 가지 옵션이 있습니다. 그것이 단지 렌더링 된 그래픽과 관련된 것이닞 아니면 다른 어떤 것이 있는지는 확실히 잘 모르겠습니다. (흥미로운 점은, 여러분이 선택한 센서와는 상관없이 1개의 카메라만 보인다는 겁니다.) :
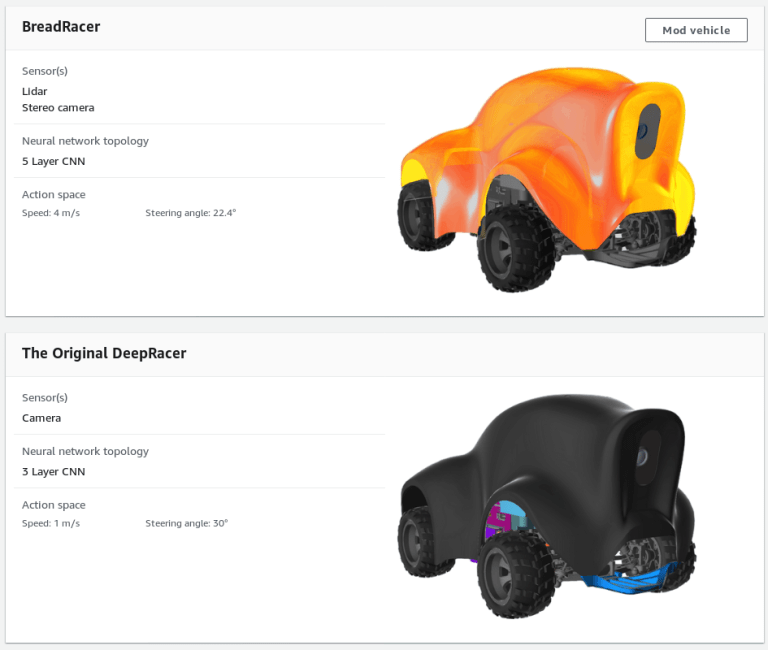
One of the noticeable changes in action space is speed range which now has a maximum value of 4 m/s. This is a fix to the problem from season 2019 where values were at a limit of 12 m/s but in reality they were approximately 3 times smaller when you looked at your car’s speed in the simulation.
action space에서 눈에 띄는 변화 중 하나는 속도 입니다. 현재 속도는 최대 4m / s로 돼 있습니다. 2019년도에는 12m/s로 제한 돼 있었습니다. 하지만 이는 실제로는 이 값은 시뮬레이터에서 자동차 스피드를 볼 때 약 3배 정도 작았기 때문에 이를 반영한 겁니다.
More technical note for those interested: This information is stored in model_metadata.json file which has an updated structure. It now contains version information (if missing it’s considered version 1, currently if present it’s set to 2), network topology and sensors listing. I have been assured by the AWS DeepRacer Team that old models are still supported, but bear in mind new ones will not work on your car until you update the firmware. Depending on how old your firmware is the process may be more or less complex. Refer to the documentation if you find any issues or ask the community.
흥미로운 다른 technical 한 점들 :이 정보는 업데이트 된 구조를 가진 model_metadata.json 파일에 저장됩니다. 이제는 버전 정보 (누락 된 경우 현재 버전 1로 설정된 경우 버전 1로 간주 됨), 네트워크 토폴로지 및 센서 목록이 포함됩니다. AWS DeepRacer 팀은 이전 모델이 계속 지원된다고 얘기했지만 실제로 확인한 결과 펌웨어를 업데이트 하기 전에는 새 모델이 자동차에서 작동하지 않습니다. 펌웨어가 얼마나 오래 됐느냐에 따라 프로세스가 다소 복잡 할 수도 아니면 간단할 수도 있습니다. 어떤 문제가 있으면 이 documentation를 참조하시거나 커뮤니티에 문의 하세요.
New types of training
I reset my resources just to be on the safe side – since there were so many updates, my settings might be stale. While I was waiting for them to be recreated, I checked out the newly updated developer documentation about selecting the sensors.
저는 안전을 생각해서 제 뎁레이서를 reset 했습니다. (그동안 업데이트가 아주 많았기 때문에 제 것은 오래된 버전일 수 있기 때문입니다.) reset되는 것을 기다리는 동안 센서를 selecting 하는 것에 대한 업데이트 된 developer documentation를 체크 해 봤습니다.
In training you now get to choose your goal – time trial, object avoidance or head-to-head racing, and a car that you want to use for the training. For head-to-head you get to choose a setup for the bots that will take part in the training:
이제 training 할 때 어떤 경주를 할 것인지 선택해야 합니다. (time trial, object avoidance or head-to-head racing) 그리고 트레이닝에 사용할 자동차도 선택해야 하구요. head-to-head를 선택했다면 트레이닝에 참여할 bots에 대한 셋업을 선택해야 합니다.

The rest of the setup looks fairly normal – set up the reward (there are new examples), choose the algorithm from a set of one, tune the hyperparameters, select training duration, start.
다른 설정들은 이전과 크게 다르지 않습니다. reward function을 넣고 (새로운 예제들이 추가 됐습니다.) 알고리즘을 선택하고 hyperparameters를 조정하고 트레이닝 시간을 선택하고 시작하시면 됩니다.
Private races
I have created a race to test the experience. The steps on how to organise your race are listed in the documentation. In current version AWS covers the cost of submissions evaluations just like in the virtual league.
시험삼아 레이스를 하나 만들어 보았습니다. 레이스 구성 방법에 대한 단계는 설명서에 나와 있습니다. 현재 버전에서 AWS는 virtual league와 마찬가지로 에서와 마찬가지로 submissions evaluations 비용을 커버해 줍니다.
The set up was reasonably easy: you set up a starting and ending date, track (only tracks available in the console are available at the moment), name, description and a graphic to display. You also set up the rules: You get a choice of 3-7 lap attempts and 1-3 consecutive laps required to be listed.
셋업은 상대적으로 쉽습니다 : 시작 및 종료 날짜, 트랙 (현재 콘솔에서 사용 가능한 트랙 만 사용 가능), 이름, description 및 표시 할 그래픽을 설정하기만 하면 됩니다. 또한 규칙을 설정해야 합니다. 3-7 lap attempts와 1-3 consecutive laps 를 선택하는 작업을 해야 합니다.
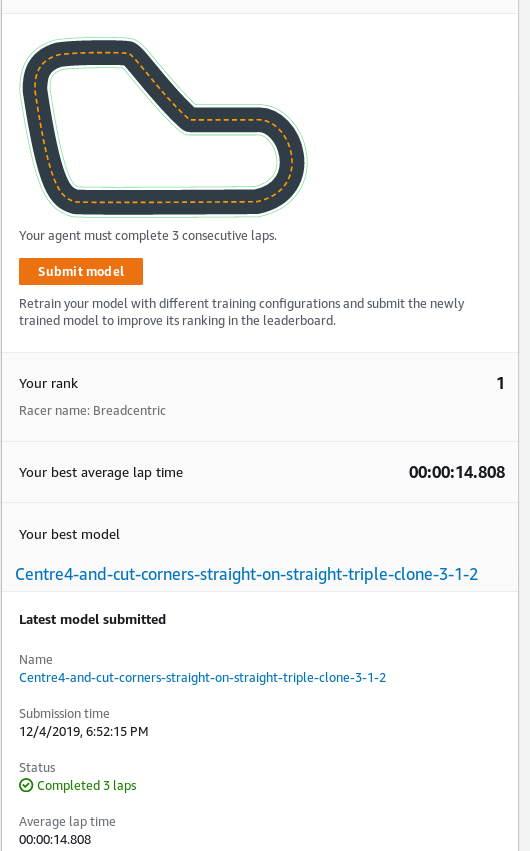
I chose the wide reInvent 2018 track and name wiDR-2020 (not sure why 2020, but the first part is pronounced “wider”). It gives three tries per submission and all three need to be completed to get listed.
나는 wide reInvent 2018 track을 선택하고 wiDR-2020이라는 이름을 사용했습니다 (왜 2020인지는 잘 모르겠고 첫번째는 wider 라고 발음합니다.). submission 당 3 번의 시도를 제공하며 이 3번 모두를 완료해야 list 됩니다.

In the setup a joining link is created so that whoever receives it can join your race. I submitted one of my models and secured a win.
설정에서 참여하는 사람이 귀하의 레이스에 참여할 수 있도록 가입 링크가 생성됩니다. 나는 내 모델 중 하나를 제출하고 저만의 레이스를 만드는데 성공했습니다.

Racer’s experience in the community race is same as in the official virtual league in previous years. I am expecting that with 24 virtual league races and community races a lot will be happening throughout the 2020 season.
커뮤니티 레이스에서의 레이서 경험은 이전의 공식 가상 리그에서와 동일합니다. 24 개의 가상 리그 경주와 community races 로 2020 시즌 내내 많은 일이 일어날 것으로 기대합니다.
As a community we are yet to dive into the new solutions that have been released. You can find out more by inspecting and using the AWS SageMaker DeepRacer sample notebook. Just remember to clean up the resources (helper code available in the notebook) and stop the notebook when you stop to stop getting charged for it.
커뮤니티로서 우리는 아직 출시 된 새로운 솔루션으로 뛰어 들지 않았습니다. AWS SageMaker DeepRacer sample notebook을 살펴보고 사용하면 좀 더 많은 것을 찾을 수 있습니다. 단지 사용하지 않을 때는 리소스를 clean up하고 notebook을 stop 하는 것을 잊지 마세요. 비용 지출을 줄이기 위해서요.
'IoT > AWS DeepRacer' 카테고리의 다른 글
| Deepracer Championship Cup Warm-up 8초대 진입 !!! (0) | 2019.12.02 |
|---|---|
| DeepRacer 새 모델 및 2020년도 이벤트 계획 (0) | 2019.11.28 |
| AWS Deepracer 10월 Virtual Race 경기 평가 (0) | 2019.11.07 |
| AWS DeepRacer Virtual 대회에서 9초대를 기록하기 까지의 과정 공유 (0) | 2019.10.01 |
| Robolink Zumi 도착 (0) | 2019.08.28 |
| AWS Deepracer 이렇게만 하면 상위권 간다. (0) | 2019.08.06 |
| AWS Deepracer Virtual Circuit The Empire City 2019/7 (0) | 2019.08.04 |
| AWS DeepRacer League - New York을 다녀와서 (0) | 2019.07.24 |
| Using Jupyter Notebook for analysing DeepRacer's logs (1) | 2019.07.23 |
| AWS Deepracer Forum Q&A (1) | 2019.07.08 |