개발자로서 현장에서 일하면서 새로 접하는 기술들이나 알게된 정보 등을 정리하기 위한 블로그입니다. 운 좋게 미국에서 큰 회사들의 프로젝트에서 컬설턴트로 일하고 있어서 새로운 기술들을 접할 기회가 많이 있습니다. 미국의 IT 프로젝트에서 사용되는 툴들에 대해 많은 분들과 정보를 공유하고 싶습니다.
As the AWS DeepRacer League finalists are gathering and finding their ways around Las Vegas, the AWS DeepSanta has come to town to bring good news: we’ve all been on the nice list!
AWS DeepRacer League 결선 진출 자들이 라스 베이거스에서 자신들의 실력을 겨루는 동안 AWS DeepSanta는 새로운 좋은 소식을 전하기 위해 마을로 왔습니다. (우리는 모두 착한 아이로 기록돼 있습니다.)
Last week Jeff Barrannounced new features on the AWS blog, he also gave an awesome shout out to us, the AWS DeepRacer Community. Throughout the week we could see changes to underlying packages and we’re tracking what we should be expecting.
지난주 Jeff Barr는 AWS 블로그에서 새로운 기능을 발표했으며 AWS DeepRacer 커뮤니티에도 그 소식을 알렸습니다. 일주일 동안 우리는 기본 패키지의 변경 사항에 대한 소식을 받아 볼 수 있었고 거기에 맞게 우리는 어떻게 해야 할지 계속 확인하고 있습니다.
Overnight the changes described went live in the console. Have a look around and let us know what you think.
지난 밤 사이 콘솔에 그 변화들이 나타나기 시작했습니다. 그 변화들을 한번 살펴 보겠습니다. 여러분들의 의견도 알려 주세요.
Just a quick recap: the three main big changes in the console are:
간략하게 살펴 보면 콘솔에서는 세가지 큰 변화가 있습니다.
The Garage where you can set up your car with different sensors and network setup,
ability to run your own tournaments
training for three types of objectives: time trial, obstacle avoidance or head-to-head racing
Garage에서는 다른 센서들과 함께 여러분의 자동차를 셋업할 수 있고 네트워크 셋업도 가능합니다.
여러분들이 직접 토너먼트를 만들 수 있습니다.
3가지 트레이닝 타입 : time trial, obstacle avoidance (장애물 피하기) or head-to-head racing (다른 자동차와 경주하기)
The Garage
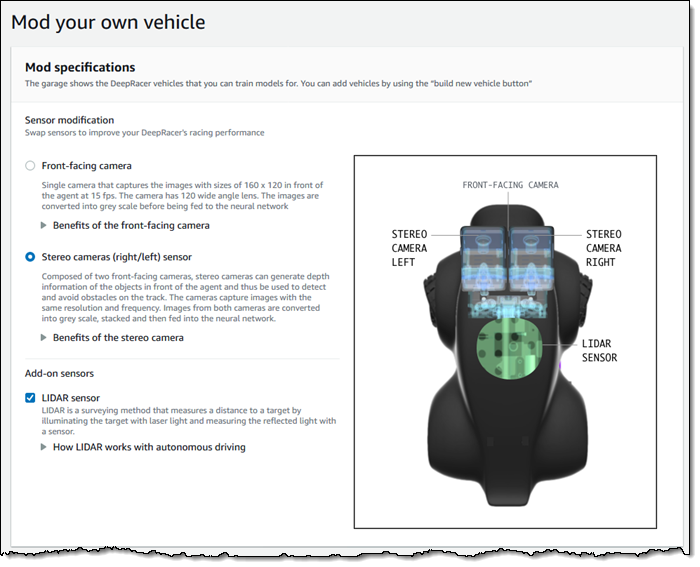
The Garage gives you a couple options including sensors, network topology, action space and updating your car’s look. It’s unclear to me if that is just for the rendered graphic or anything more (interestingly, the shell shown is for single camera regardless of the sensors that you select) :
Garage에는 센서, 네트워크 토폴로지, action space 및 차량 외관 업데이트를 포함한 몇 가지 옵션이 있습니다. 그것이 단지 렌더링 된 그래픽과 관련된 것이닞 아니면 다른 어떤 것이 있는지는 확실히 잘 모르겠습니다. (흥미로운 점은, 여러분이 선택한 센서와는 상관없이 1개의 카메라만 보인다는 겁니다.) :
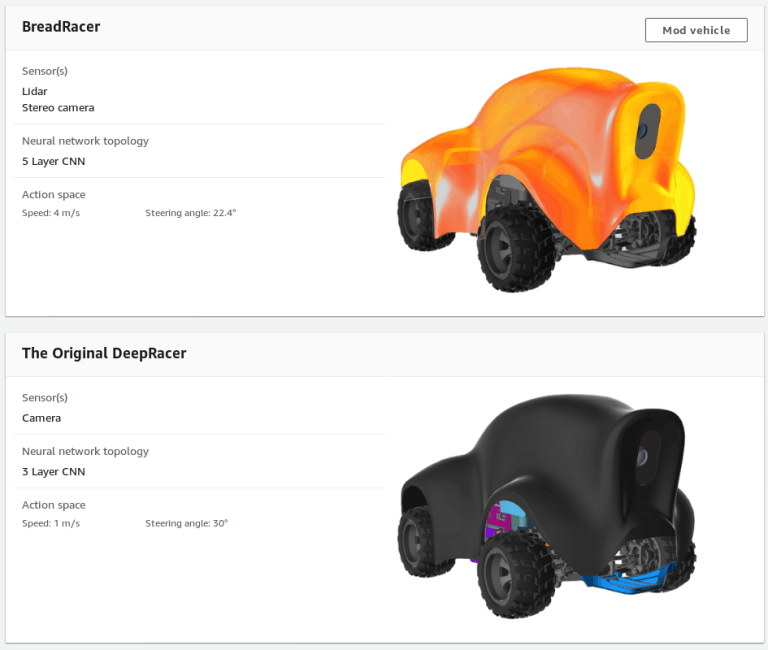
One of the noticeable changes in action space is speed range which now has a maximum value of 4 m/s. This is a fix to the problem from season 2019 where values were at a limit of 12 m/s but in reality they were approximately 3 times smaller when you looked at your car’s speed in the simulation.
action space에서 눈에 띄는 변화 중 하나는 속도 입니다. 현재 속도는 최대 4m / s로 돼 있습니다. 2019년도에는 12m/s로 제한 돼 있었습니다. 하지만 이는 실제로는 이 값은 시뮬레이터에서 자동차 스피드를 볼 때 약 3배 정도 작았기 때문에 이를 반영한 겁니다.
More technical note for those interested: This information is stored in model_metadata.json file which has an updated structure. It now contains version information (if missing it’s considered version 1, currently if present it’s set to 2), network topology and sensors listing.I have been assured by the AWS DeepRacer Team that old models are still supported, but bear in mind new ones will not work on your car until you update the firmware. Depending on how old your firmware is the process may be more or less complex. Refer to thedocumentationif you find any issues orask the community.
흥미로운 다른 technical 한 점들 :이 정보는 업데이트 된 구조를 가진 model_metadata.json 파일에 저장됩니다. 이제는 버전 정보 (누락 된 경우 현재 버전 1로 설정된 경우 버전 1로 간주 됨), 네트워크 토폴로지 및 센서 목록이 포함됩니다. AWS DeepRacer 팀은 이전 모델이 계속 지원된다고 얘기했지만 실제로 확인한 결과 펌웨어를 업데이트 하기 전에는 새 모델이 자동차에서 작동하지 않습니다. 펌웨어가 얼마나 오래 됐느냐에 따라 프로세스가 다소 복잡 할 수도 아니면 간단할 수도 있습니다. 어떤 문제가 있으면 이 documentation를 참조하시거나 커뮤니티에 문의 하세요.
New types of training
I reset my resources just to be on the safe side – since there were so many updates, my settings might be stale. While I was waiting for them to be recreated, I checked out the newly updateddeveloper documentation about selecting the sensors.
저는 안전을 생각해서 제 뎁레이서를 reset 했습니다. (그동안 업데이트가 아주 많았기 때문에 제 것은 오래된 버전일 수 있기 때문입니다.) reset되는 것을 기다리는 동안 센서를 selecting 하는 것에 대한 업데이트 된 developer documentation를 체크 해 봤습니다.
In training you now get to choose your goal – time trial, object avoidance or head-to-head racing, and a car that you want to use for the training. For head-to-head you get to choose a setup for the bots that will take part in the training:
이제 training 할 때 어떤 경주를 할 것인지 선택해야 합니다. (time trial, object avoidance or head-to-head racing) 그리고 트레이닝에 사용할 자동차도 선택해야 하구요. head-to-head를 선택했다면 트레이닝에 참여할 bots에 대한 셋업을 선택해야 합니다.
The rest of the setup looks fairly normal – set up the reward (there are new examples), choose the algorithm from a set of one, tune the hyperparameters, select training duration, start.
다른 설정들은 이전과 크게 다르지 않습니다. reward function을 넣고 (새로운 예제들이 추가 됐습니다.) 알고리즘을 선택하고 hyperparameters를 조정하고 트레이닝 시간을 선택하고 시작하시면 됩니다.
Private races
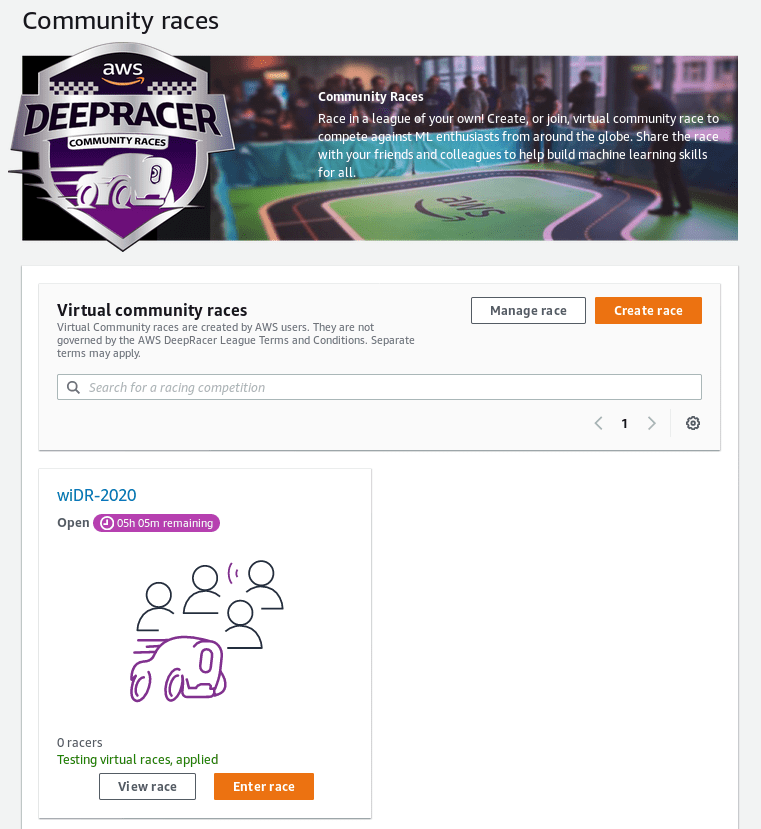
I have created a race to test the experience. The steps on how to organise your race are listed inthe documentation. In current version AWS covers the cost of submissions evaluations just like in the virtual league.
시험삼아 레이스를 하나 만들어 보았습니다. 레이스 구성 방법에 대한 단계는 설명서에 나와 있습니다. 현재 버전에서 AWS는 virtual league와 마찬가지로 에서와 마찬가지로 submissions evaluations 비용을 커버해 줍니다.
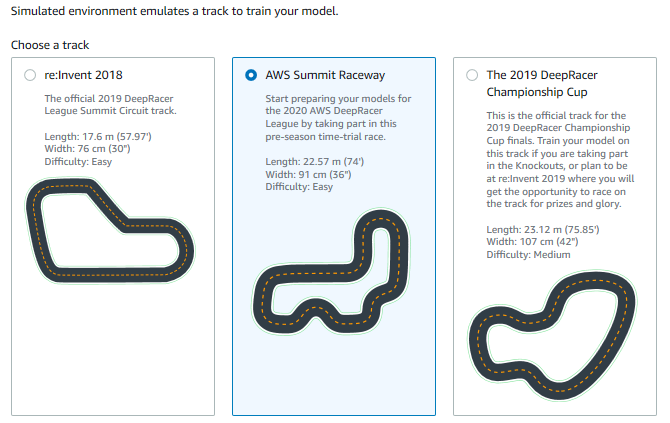
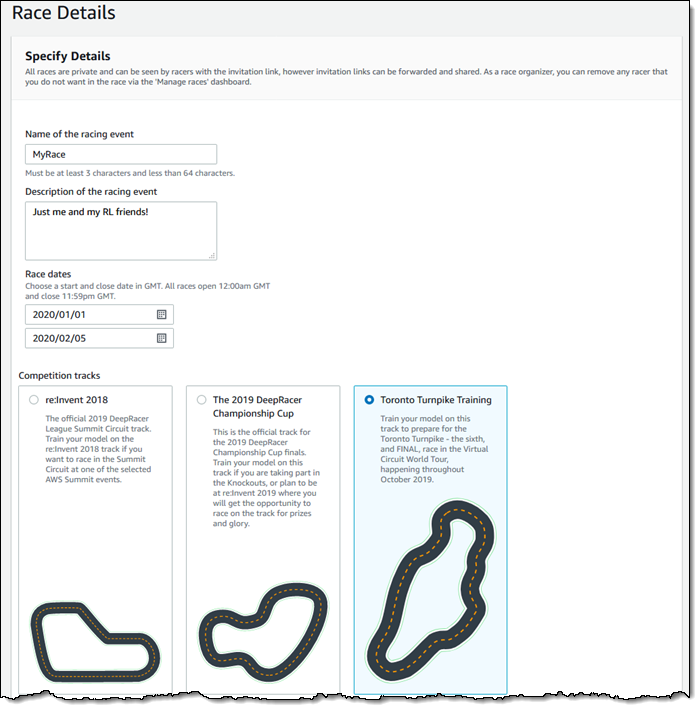
The set up was reasonably easy: you set up a starting and ending date, track (only tracks available in the console are available at the moment), name, description and a graphic to display. You also set up the rules: You get a choice of 3-7 lap attempts and 1-3 consecutive laps required to be listed.
셋업은 상대적으로 쉽습니다 : 시작 및 종료 날짜, 트랙 (현재 콘솔에서 사용 가능한 트랙 만 사용 가능), 이름, description 및 표시 할 그래픽을 설정하기만 하면 됩니다. 또한 규칙을 설정해야 합니다. 3-7 lap attempts와 1-3 consecutive laps 를 선택하는 작업을 해야 합니다.
I chose the wide reInvent 2018 track and name wiDR-2020 (not sure why 2020, but the first part is pronounced “wider”). It gives three tries per submission and all three need to be completed to get listed.
나는 wide reInvent 2018 track을 선택하고 wiDR-2020이라는 이름을 사용했습니다 (왜 2020인지는 잘 모르겠고 첫번째는 wider 라고 발음합니다.). submission 당 3 번의 시도를 제공하며 이 3번 모두를 완료해야 list 됩니다.
In the setup a joining link is created so that whoever receives it can join your race. I submitted one of my models and secured a win.
설정에서 참여하는 사람이 귀하의 레이스에 참여할 수 있도록 가입 링크가 생성됩니다. 나는 내 모델 중 하나를 제출하고 저만의 레이스를 만드는데 성공했습니다.
Racer’s experience in the community race is same as in the official virtual league in previous years. I am expecting that with 24 virtual league races and community races a lot will be happening throughout the 2020 season.
커뮤니티 레이스에서의 레이서 경험은 이전의 공식 가상 리그에서와 동일합니다. 24 개의 가상 리그 경주와 community races 로 2020 시즌 내내 많은 일이 일어날 것으로 기대합니다.
As a community we are yet to dive into the new solutions that have been released. You can find out more by inspecting and using theAWS SageMaker DeepRacer sample notebook. Just remember to clean up the resources (helper code available in the notebook) and stop the notebook when you stop to stop getting charged for it.
커뮤니티로서 우리는 아직 출시 된 새로운 솔루션으로 뛰어 들지 않았습니다. AWS SageMaker DeepRacer sample notebook을 살펴보고 사용하면 좀 더 많은 것을 찾을 수 있습니다. 단지 사용하지 않을 때는 리소스를 clean up하고 notebook을 stop 하는 것을 잊지 마세요. 비용 지출을 줄이기 위해서요.
Ifirst wroteaboutAWS DeepRacerat this time last year, and described it as an opportunity for you to get some hands-on experience with Reinforcement Learning (RL). Along with the rest of the AWS team, I believe that you should always be improving your existing skills and building new ones.
작년 이맘때 쯤 AWS DeepRacer에 대해 처음 글을 썼습니다. 그 글에서는 강화학습 -Reinforcement Learning (RL)-에 대해 실전 경험을 쌓을 수 있는 아주 좋은 기회가 될 거라고 언급했습니다. 다른 AWS 팀과 함께 여러분은 기술을 발전시키고 새로운 기술을 만드는 일을 지속적으로 해야 할 것이라고 믿었습니다.
We launched theAWS DeepRacercar and theAWS DeepRacer Leagueso that you could have the opportunity to get experience and new skills in a fun, competitive environment. In less than a year, tens of thousands of developers have participated in hands-on and virtual races located all over the world. Their enthusiasm and energy have been inspiring, as has been the creativity. Earlier this month,Jungyoul Yu, a leader of AWS Korea Usergroup wrote about hisDeepRacer Lap Timer(be sure to check out all of hisvideosand hiscode). TheDeepRacer Slack Communityhas over 1000 racers, thanks to the efforts of AWS ML HeroLyndon Leggate. Another AWS DeepRacer Community Member,Tomasz Ptak, runs theAWS DeepRacer Community Blog.
재미 있고 경쟁적인 환경에서 새로운 경험과 기술을 습득 할 수 있도록 AWS DeepRacer 자동차를 출시하고 AWS DeepRacer 리그를 시작했습니다. 1 년도 안 되어서 수만 명의 개발자가 전 세계에 위치한 실제 오프라인 레이스와 가상 온라인 레이스에 참여했습니다. 그들의 열정과 에너지는 고무적이었고 창의성도 아주 뛰어났습니다. 이번 달 초, AWS Korea Usergroup의 리더 인 Jungyoul Yu는 그의 DeepRacer Lap Timer에 대한 글을 썼습니다 (그의 비디오와 코드를 확인해 보세요). DeepRacer Slack Community는 1000 명이 넘는 레이서가 가입해 활동하고있습니다. AWS ML Hero Lyndon Leggate의 노력에 사의를 표합니다. 다른 AWS 커뮤니티 영웅인 Cyrus Wong은 AWS DeepRacer 커뮤니티 블로그를 운영하고 있습니다.
All of this enthusiasm and energy has spread to our partners and enterprise customers as well.APN Premier Partner Accenturehas created one of theWorld’s Largest Private DeepRacer Leagues, spanning 30 global locations and 17 countries. We have seen that DeepRacer has sparked interest in machine learning from our enterprise customers, and has inspired them to start multiple production-grade ML projects.
이 모든 열정과 에너지는 우리의 파트너사들과 기업 고객에게도 퍼져 나갔습니다. APN Premier Partner Accenture는 전 세계 30 개 지역과 17 개국에 걸쳐 세계 최대 규모의 프라이빗 딥 레이서 리그 중 하나를 만들었습니다. DeepRacer는 엔터프라이즈 고객의 머신 러닝에 대한 관심을 불러 일으켰으며 여러 프로덕션 급 ML 프로젝트를 시작하도록 고무 시켰습니다.
Today I would like to tell you about the three ways that we are growing the DeepRacer program. We are adding more chances to compete at AWS events & at your own events, more chances to win, with new races including head-to-head multi-car competitions, and an upgraded DeepRacer car with new sensing capabilities.
오늘 제가 하고자 하는 말은 DeepRacer 프로그램을 성장시키는 세 가지 방법에 대해 말씀 드리고자합니다. 우리는 AWS event들과 여러분만의 event에서 경쟁할 수 있는 좀 더 많은 기회를 제공할 것이고 우승할 수 있는 좀 더 많은 기회를 제공할 것이며 그 기회들은 head-to-head multi-car competitions을 포함한 새로운 레이싱 대회를 통해서 그리고 새로운 sensing capabilities를 장착한 업그레이드 된 DeepRacer car와 함께 제공될 것입니다.
Announcing AWS DeepRacer Evo
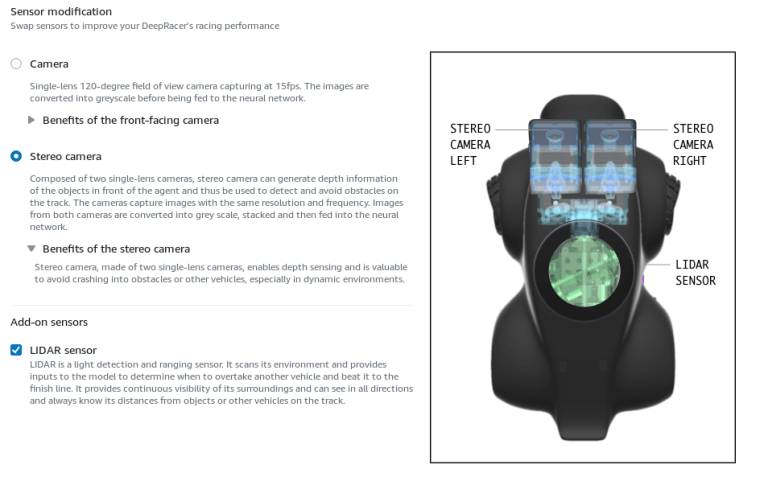
We are working to make the AWS DeepRacer car even more perceptive and powerful. The upcoming AWS DeepRacer Evo car will include a stereo camera and aLight Detection and Ranging(LIDAR) sensor. The added sensors will enable DeepRacer Evo to skillfully detect and respond to obstacles, including other DeepRacers. This will help you to learn even more about the exciting field of reinforcement learning, which is ideal for use in autonomous driving.
우리는 AWS DeepRacer 자동차를 더욱 지각적 능력이 있고 파워풀하게 만들기 위해 노력하고 있습니다. 곧 출시 될 AWS DeepRacer Evo 차량에는 스테레오 카메라와 LIDAR (Light Detection and Ranging) 센서가 포함됩니다. 추가 된 센서는 DeepRacer Evo가 다른 DeepRacer를 포함한 장애물을 능숙하게 감지하고 이에 대응할 수 있도록합니다. 이를 통해 자율 주행에 이상적인 흥미로운 강화 학습 분야에 대해 더 많이 배울 수 있습니다.
The new sensors will be available soon in virtual form for use in the newMy Garagesection of theDeepRacer Console. I’ll have more info about our production plans for AWS DeepRacer Evo, including a sensor upgrade kit for your existing DeepRacer car, in early 2020.
새로운 센서들은 DeepRacer 콘솔의 new My Garage 섹션에서 사용할 수 있도록 virtual form으로 곧 제공 될 예정입니다. 2020 년 초에 기존 DeepRacer 차량에 대한 센서 업그레이드 키트를 포함하여 AWS DeepRacer Evo의 생산 계획에 대한 자세한 정보를 알려 드릴 것입니다.
If you would like to be notified when the DeepRacer Evo car is available for purchase,sign up here.
DeepRacer Evo 차량 구입 가능할 때 알림을 받으려면 여기에 가입하십시오.
New Racing Challenges & Opportunities
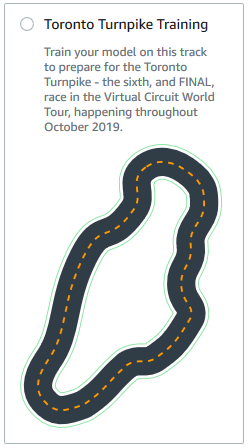
We are expanding the DeepRacer League in 2020. We’re adding 8 additional races in 5 countries as part of an expandedAWS Summitpresence, and 18 additional virtual races. There will also be a track (and a race) atre:MARS 2020. As a result, you now have 30 opportunities to join us for an in-person AWS DeepRacer League Summit race, along with 24 Virtual Circuit races that you can join from anywhere in the world.
2020 년에는 DeepRacer League를 더욱 확장합니다. AWS Summit 확장의 일환으로 5 개국에서 8 개의 경주를 더 추가하고 18 개의 가상 경주를 추가합니다. re : MARS 2020에는 트랙 (및 레이스)도 구비돼 있을 겁니다. 결과적으로 여러분은 직접 오프라인 상으로 참여할 수 있는 30개의 AWS DeepRacer League Summit race 기회를 갖게 될 것이며 전세계 어디에서나 온라인으로 참여가 가능한 24 개의 Virtual Circuit 레이스 기회도 얻게 될 것입니다.
In addition to the existing time trial race, we are adding two new race types to give you some new RL challenges, and to give you the opportunity to experiment with different sensors:
기존의 time trial (속도 경주) 레이스 외에도 새로운 RL 과제를 제공하고 다양한 센서를 실험 할 수있는 두 가지 새로운 레이스 유형이 추가되었습니다.
Object Detection & Avoidance– Use the sensors to detect and (hopefully) avoid obstacles. 센서를 사용하여 장애물을 감지하고 그 장애물을 피하는 대회 입니다.
Head-to-Head Racing– Race against another DeepRacer that is on the same track. Do your best to avoid it while still turning in the best lap time.
같은 트랙에있는 다른 DeepRacer와 경쟁하게 됩니다. 최고의 랩 타임을 유지하면서 경쟁 자동차를 피해야 하는 대회입니다.
Both of these new challenges will require you to construct really goodreward functionsand to carefullytune your hyperparameters! You will be able to create a customized sensor configuration in the new onlineGarage:
이 두 가지 새로운 대회에 참여하기 위해서 여러분은 정말 훌륭한 reward functions을 구성하고 신중하게 hyperparameters를 조정해야 할 것입니다. 여러분은 new online Garage에서 맞춤형 센서 구성을 만들 수 있습니다.
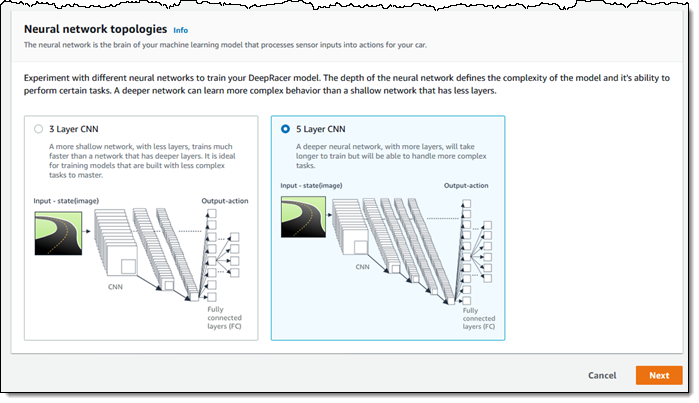
You will also have the ability to choose your own neural network topology:
또한 여러분은 여러분만의 neural network topology를 선택할 수 있습니다.
Create Your Own Races
We are going to give you the ability to create your own virtual Community Races in the console. You will be able to organize competitions (and track progress) within your company, tech community, neighborhood, or friend list:
우리는 또한 여러분에게 콘솔에서 여러분만의 virtual Community Races를 만들 수있는 기능을 제공 할 것입니다. 회사, tech 커뮤니티, 이웃 또는 친구 모임 안에서 대회를 조직하고 진행 상황을 track 할 수 있습니다.
AWS DeepRacer at re:Invent
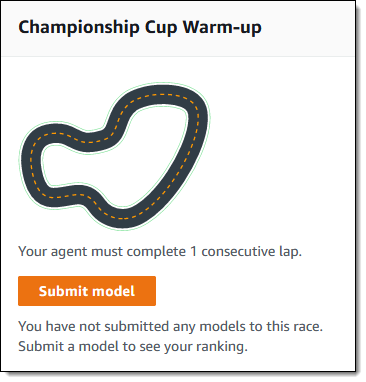
As I write this, the top 64 racers are preparing for the 2019 Championship Cup Knockouts that will take place at re:Invent 2019. Over 650 racers prepared for this race by building & training their models on theChampionship Cup Warm-Up, with lap times as low as 5.35 seconds.
내가 이 글을 쓰는 동안 top 64 명의 레이서들이 2019 년 re : Invent 2019에서 열리는 2019 Championship Cup Knockouts를 준비하고 있습니다. 650명이 넘는 레이서들이 이 대회에 대비해 Championship Cup Warm-Up에서 그들의 모델을 만들고 트레이닝을 하고 있습니다. with lap times as low as 5.35 seconds.
If you are planning to attend re:Invent, there’s a lot of DeepRacer action in the works. Here’s an overview:
re : Invent에 참석할 계획이라면 DeepRacer 관련 행사가 re : Invent에 많이 마련돼 있습니다. 그 행사들은 대략 다음과 같습니다.
DeepRacer League– The 22nd and final qualifying race will take place on December 2nd at theQuadin Aria.
22 번째와 최종 예선 경기는 12 월 2 일 Aria의 Quad에서 열립니다.
DeepRacer Championship Cup at the MGM Grand Garden Arena– Six tracks will be open from Tuesday through Thursday, with time for open-play racing and opportunities for you to get hands-on time with an AWS DeepRacer Evo. The 64 fastest racers from around the world will compete and the fastest 3 will proceed to the on-stage finals at 8 AM on December 5th, before Werner’s keynote. The winner will get to lift the Championship Cup.
화요일부터 목요일까지 6 개의 트랙이 open 됩니다. 여기에서는 open-play racing과 AWS DeepRacer Evo로 체험할 기회를 얻을 수 있을 겁니다. 전 세계에서 모인 64명의 가장 빠른 레이서들은 서로 경쟁을 통해 3명을 추리게 되고 그 3명은 Werner의 keynote 전에 12 월 5 일 오전 8시에 on-stage 결승전에 임하게 됩니다. 우승자는 Championship Cup을 차지하게 됩니다.
DeepRacer Expert Bootcamp– A joint effort by the AWS DeepRacer Community and AWS, this event is for developers who are serious about competing in the upcoming 2020 league.
AWS DeepRacer Community와 AWS의 공동 노력으로 마련됐습니다. 이 Bootcamp는 행사는 다가오는 2020 리그에서 경쟁하는 것을 진지하게 생각하는 개발자를 위한 것입니다.
DeepRacer Workshops– We will be hosting ten introductory workshops and one Under the Hood deep dive.
우리는 10 개의 입문 워크숍과 하나의 Under the Hood deep dive를 선사할 것입니다.
이러한 모든 이벤트에 대한 자세한 내용은 re : Invent 페이지의 DeepRacer 이벤트를 참조하십시오!
AWS DeepRacer in 2020
We have a lot of exciting events planned for 2020, and I’ll share more information as soon as it becomes available. The AWS DeepRacer League will start in March 2020, and will include new tracks and other challenges designed to test your skills.
2020 년에는 흥미로운 이벤트가 많이 계획되어 있으며 더 많은 정보가 공개되는대로 알려 드리겠습니다. AWS DeepRacer League는 2020 년 3 월에 시작되며 기술을 테스트하도록 설계된 새로운 트랙 및 기타 과제를 포함합니다.
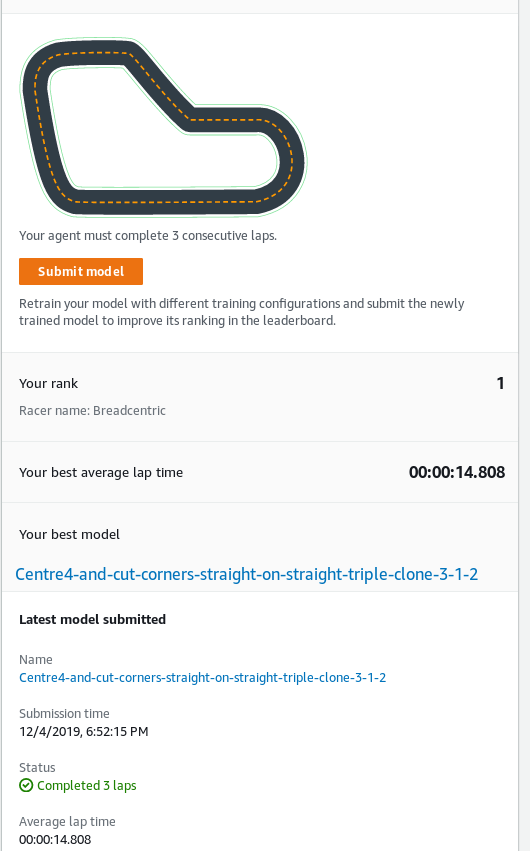
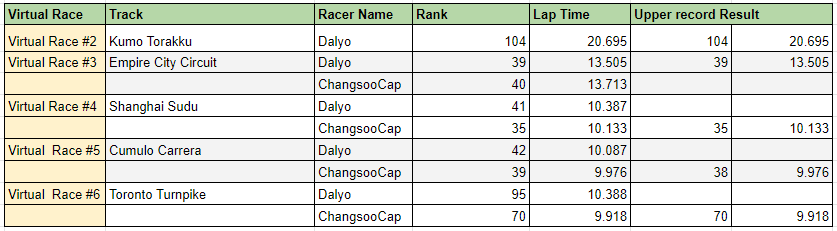
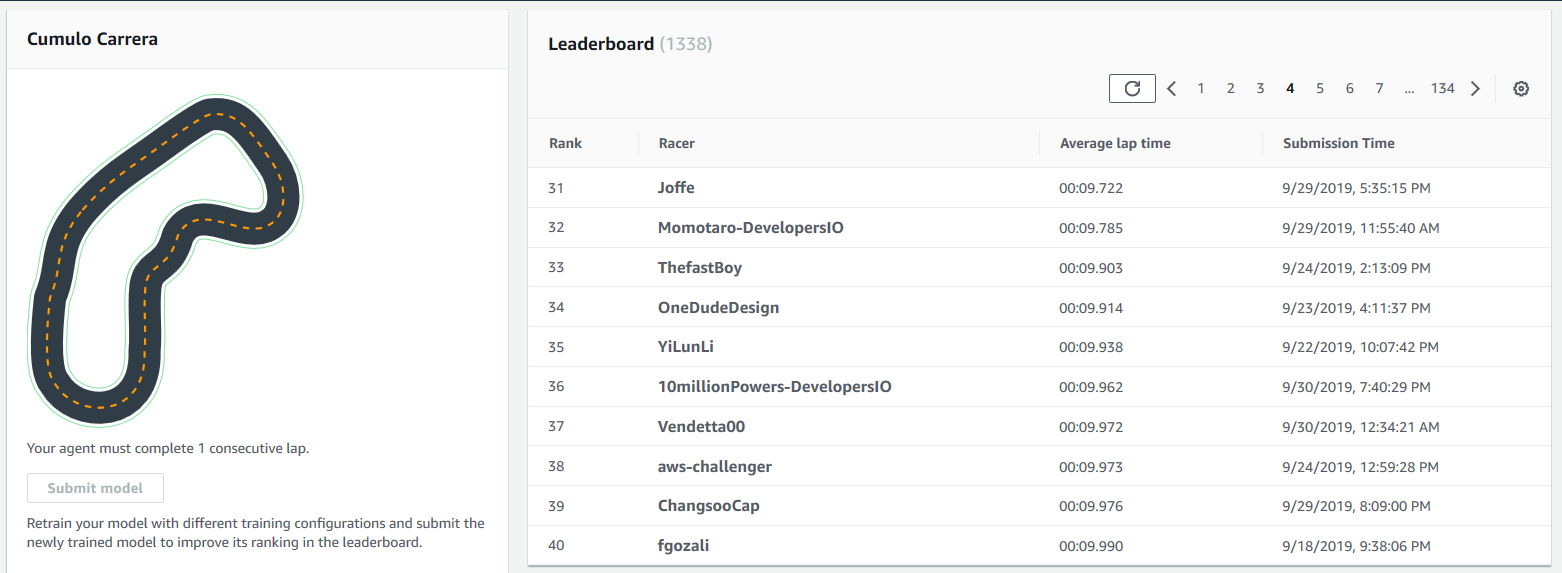
지난달의 9.976보다는 앞선 기록이고 2회 연속 9초대 달성이란 면에서 나쁘지 않은 기록 같지만...
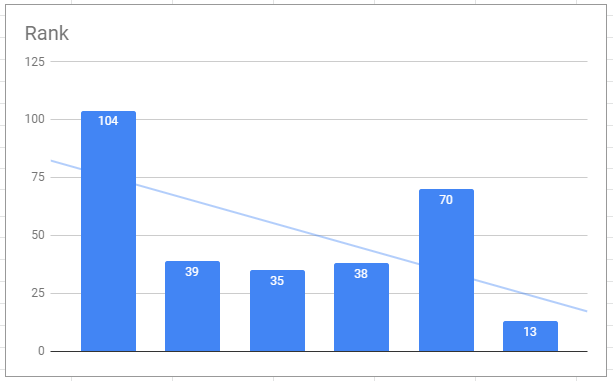
다른 참가자들의 성적은 훨씬 많이 좋아졌나보다. 등수는 30등대에서 70등대로 크게 뒤쳐졌다.
이번 대회에서 사용된 트랙은 좀 쉬웠는지 9초대 이내 기록이 76명이나 나왔다. 8초대 이내는 42명 그 중에서 7초대는 9명이나 나왔다.
7초대는 지난 대회까지는 안 나왔던 기록이다. 지난달 8초대 이내는 6명이었고 9초대 이내는 40명 이었다.
참가자 수는 1338에서 1983명으로 600명 이상 늘었다.
이번달 참가자들의 성적이 크게 좋아진 것은...
아마도 상위 랭크 참가자들이 새로운 계정들을 만들어서 복수 계정으로 참가한 것이 한 원인이 아닌가 분석해 본다. 그리고 단체 참가자들 중 성적이 좋은 그룹들이 서로 정보를 공유했을 수도 있을 것이다.
이런 이유들이 9초대 최상위권이 40명에서 76명으로 따블로 늘어난 이유인 것으로 보인다.
하지만 한명도 없었던 7초대가 9명이나 나오고 또 8초대도 6명에서 42명으로 7배나 오른 것은 참가자들의 실력이 지난달 보다 확실히 늘어난 것이라고 봐야 한다.
이에 비해 내 기록은 만족할 만한 수준에서 훨씬 뒤떨어진다.
이번 대회에서는 한가지 변화가 있었다. Action Space의 최대 Speed가 8에서 12로 늘었다.
난 새로운 모델을 만들면서 최대 스피드를 12로 설정했었는데 이것은 한번도 완주에 성공하지 못했다. 최고 스피드 12는 허용되는 값이긴 하지만 실제로는 너무 빠른 스피드인 것 같다.
다른 속도로도 새로운 모델을 만들었었는데... 별로 좋은 성적이 나오지는 않았다.
대신에 이전 대회에 만들었던 모델들로 돌리다 보니까 성적이 좋은 애들이 나와서 그 모델들을 사용해서 최고 기록을 얻을 수 있었다. Action Space 값들을 바꾸면서 돌려도 보고 또 훈련 시킨후에 돌려보고 하다가 최고 기록이 나오게 됐다.
의도록으로 계획을 해서 세팅한 모델로는 10초대가 최고 기록이었다. 이번 대회의 9초대 기록은 Action Space를 무리하게 설정해서 한번 끝까지 돌려보자라는 생각으로 돌리다가 얻어 걸린 기록이었다. 몇십번 돌렸는데 모두 실패하고 9초대 기록 하나만 성공한 케이스였다.
이런식으로 하면 다음 대회에서도 9초대를 얻는건 완전히 운에 달려 있을 수 밖에 없다.
진짜 실력으로 9초대까지 가도록 해야 한다.
11월 대회에서는 기존에 하던대로 최고 스피드 8로 훈련시킨 모델과 최고 스피드 10으로 훈련시킨 모델로 한번 도전해 보려고 한다.
훈련 방법은 새로 얻은 정보들이 없어서 기존과 동일한 reward function과 Hyperparameter를 쓸 계획이다.
그런 후에 성적이 좋은 모델을 가지고 Action Space 값을 바꾸면서 최고 성적을 노리는 방법이다.
새로운 reward function, Hyperparameter 나 Log 분석, Local training setting 그리고 자동으로 모델 Submit 하는 Framework 개발 등 새로 도전해서 배우고 싶은 분야들은 아주 많은데 거기에 투자할 시간이 없다. 시간 나는대로 틈틈이 그리고 꾸준히 한번 진행해 볼 생각이다.
Anyway, 이번 11월 Vertual Race 목표는 9.5 초 이내 Lap Time과 50등 이내 기록이다.
12월에는 라스베가스에서 aws re:Invent 행사가 열리고 그 행사 중 DeepRacer 2019 공식 대회가 열린다.
한국에서는 대여섯명 정도 초청장을 받을 것 같다. 실제로 몇명이 참가하는지는 모르겠다. 나는 첫번째 Vertual 대회에 참가하지 못해 점수가 안 되서 초청장을 받지 못했다. 그리고 그 행사 참가비도 초청장과 별도로 몇백만원은 내야 하는 걸로 알고 있다. (초청장은 항공료와 호텔 숙박비를 대 주는 것으로 알고 있다.) 나는 올해 대회에 참가하지는 못할 것 같다.
아마존에 주문한 Deepracer Car도 계속 연기 되면서 언제 배달 될지 소식도 없고.....
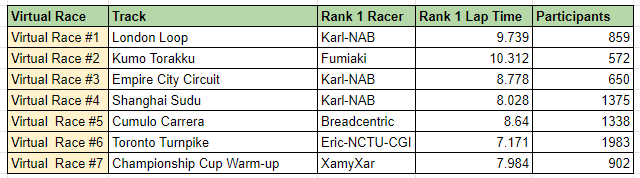
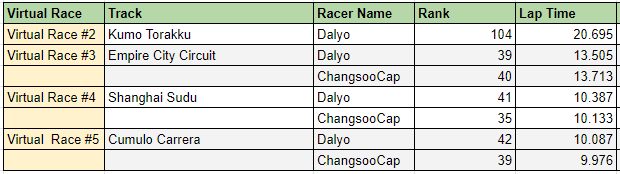
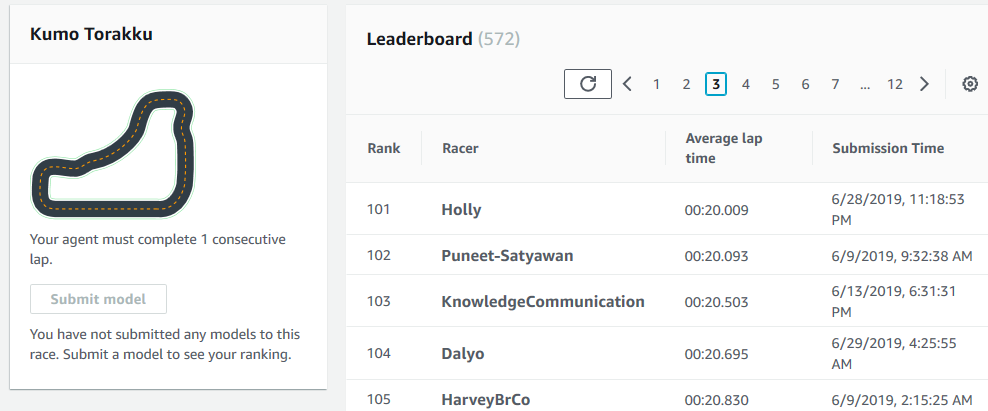
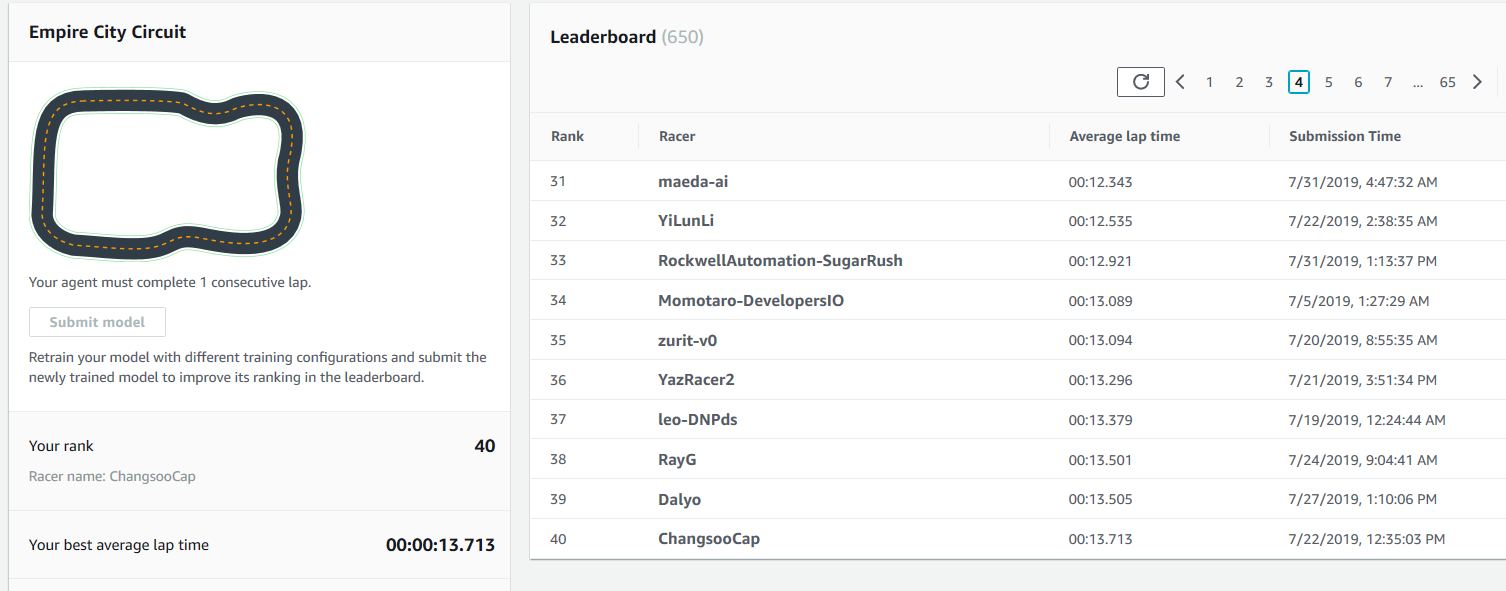
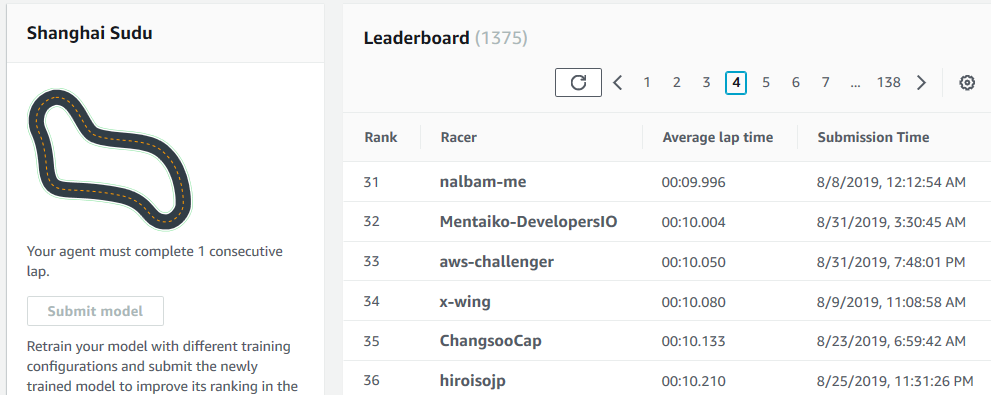
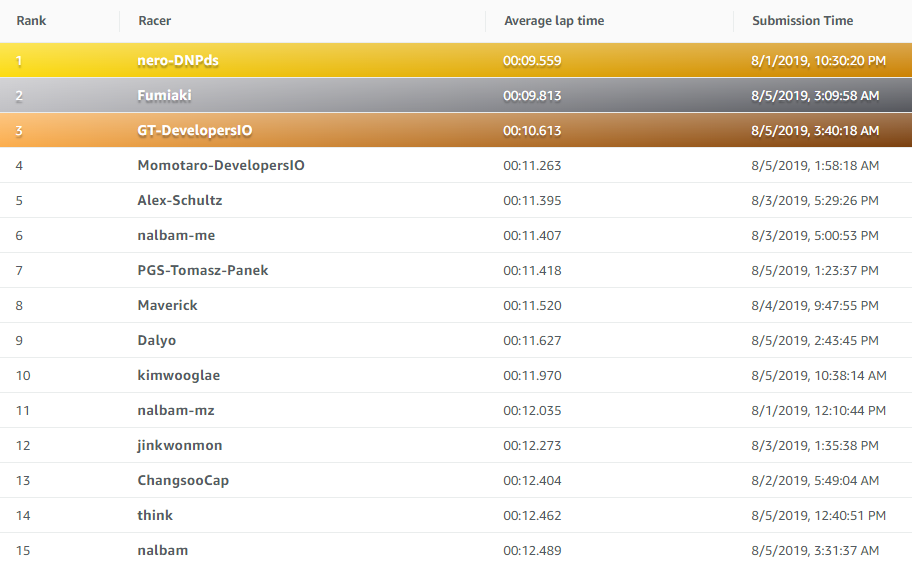
AWS Deepracer virtual league에 Dalyo라는 계정과 ChangsooCap 이라는 두개의 계정으로 출전하고 있다.
이번달 Virtual Circuit 성적은 현재 Dalyo가 11초 627로 9등이고 ChangsooCap은 12초 404로 13등이다.
ChangsooCap은 지난달에 첨 출전했는데...
첨 출전한 계정 중에 최고 점수를 획득했다고 아마존에서 상금을 준단다.
DearChangsooCap,
Congratulations on placing 1stin the AWS DeepRacer League weekly challenge! As a 1stplace Rookie in July, you will receive $200 in AWS credits. To claim your prize, please respond to this email to confirm receipt and receive your promotional code.
We hope you enjoyed your racing experience and will back to continue to climb the leaderboard for a chance to win a trip to the re:Invent and compete for the 2019 Championship Cup.
Thank you
The AWS DeepRacer League Team
200달러를 받게 됐다.
나는 처음 프로그래밍을 배울 때 PHP로 시작했다. 그 때가 아마 1999년도쯤 됐을 텐데.....
그 때 양대 진영으로 프로그래밍계가 나눠 졌는데.. 바로 리눅스 진영과 윈도우 진영.
리눅스 진영은 Open source 정신으로 소스코드를 공유하고 다 같이 발전시키자는 철학이 있었다.
윈도우 진영은 이 분야를 산업화 대중화 시키는 쪽으로 역할을 했다. 비공개, 이윤추구로 빌 게이츠는 세계 최고의 부자가 되었다.
이 리눅스 진영에 속한 프로그래밍 언어가 PHP, JAVA 등이고 윈도우 진영은 ASP, 닷넷(.Net) 등이다.
내가 생각하기엔 애플(iOS)은 이 리눅스 진영에 속하지만 윈도우 처럼 비공개 이윤추구를 꾀한 쪽이라고 판단된다.
하여간 나의 프로그래밍 세계 출발점이 오픈소스부터 시작해서 그런지 나의 경험을 공개해서 다른 사람들에게 조금이라도 도움이 되는 면이 있다면 되도록 공개하는 쪽으로 마음이 쏠린다.
나도 그런 사람들 덕분에 많이 배웠고 앞으로도 많이 배워야 하기 때문이다.
AWS Deepracer League에 참여하면서 자율주행을 위한 모델을 훈련시키면서 여러 방법을 시도 했었다.
지금은 11초대까지 달성했고 이제 최선두 그룹인 9초대 달성이 목표다.
아직 9초대를 달성 하려면 어떻게 해야 하는지 전혀 감이 안 온다.
다른 누군가가 그 비법을 공개하고 내가 그 정보를 빨리 접할 수 있기를 바라면서...
내가 11초대를 기록했던 모델의 configuration을 공유한다.
우선 AWS Deepracer 모델을 만드려면 3가지 구성요소를 세팅해야 한다.
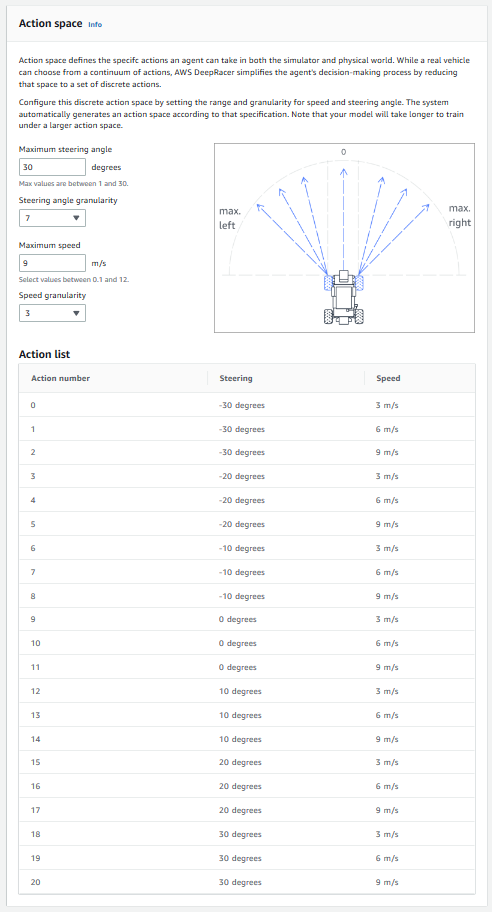
첫번째로 Action Space인데 나는 전부 Maximum을 선택했다.
이 값들이 Maximum 값이다.
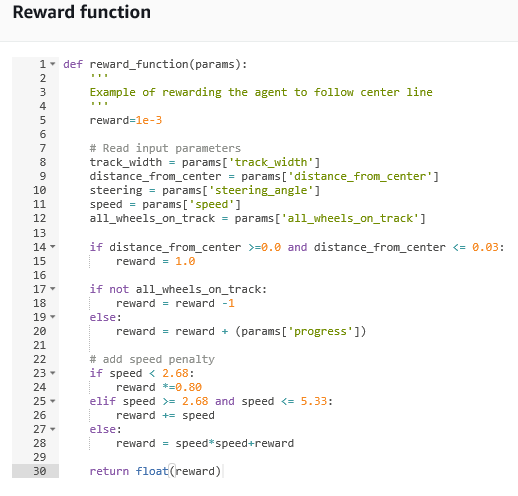
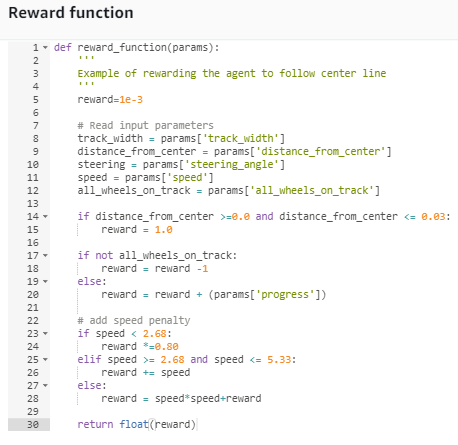
그리고 두번째는 reward_function인데.... 아래 보는 것 처럼 나는 중앙선 유지 그리고 모든 바퀴가 트랙 안에 있도록 reward를 주는 것을 기본으로 하고...
그 이외에는 progress와 speed 를 가지고 콘트롤 한다.
상황에 따라서 progress 부분의 reward를 줄이기도 하고 speed의 reward를 늘리기도 한다.
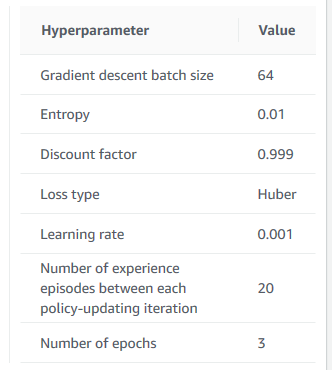
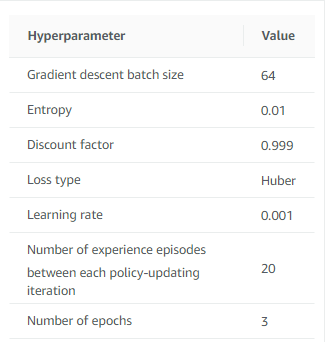
마지막으로 Hyperparameter가 있는데...
이건 아직 제대로 공부를 못해서 하나도 모른다.
그냥 어디서 누군가가 Learning rate를 0.001로 그리고 Number of epochs를 3으로 세팅 했길래 그냥 따라 했다.
그게 뭔지 잘 모른다.
이렇게만 하고 7~10시간 훈련 시키면 잘 하면 13초대가 나온다. 운 좋으면 그냥 11초대도 갈 수 있다.
그런데 11초대 나온 후에 더 훈련 시키면 오히려 기록이 늦춰지더라구..
14초대 15초대 16초대...
아마 훈련을 거듭하면서 Deepracer가 안정성을 확보하는 쪽으로 더 기우는 거 같다.
안정성도 확보하면서 스피드도 더 늘려야 9초대로 진입할 수 있을 텐데...
아직 어떻게 해야 할 지 감이 안 잡힌다.
혹시 AWS Deepracer 새로 시작하려는데 아무런 감도 안오시는 분들은 위의 세팅만 따라해도 어느정도 점수는 나올거다.
운 좋으면 나처럼 이달의 Rookie로 선정돼 200달러를 상금으로 받을 수도 있다.
아마존에서는 그달에 처음 출전하는 계정 중 가장 좋은 기록한 사람이랑 가장 많은 모델로 도전한 사람 둘을 뽑아서 별도로 상금을 주고 있다.
좀 더 많은 사람들이 AWS Deepracer로 자율주행 모델에 도전하기를 바라면서......
그리고 더 좋은 방법 발견하면 다른 사람과 공유하면서 다 같이 발전하길 바라면서......
Training a model for DeepRacer involves getting a lot of data and then while you can ignore it, you can also analyze it and use for your own benefit.
Training a model for DeepRacer involves getting a lot of data and then while you can ignore it, you can also analyze it and use for your own benefit.
DeepRacer 모델을 교육하려면 많은 양의 데이터를 가지고 분석한 후 여러분의 모델의 성능향상을 위해 사용하는 것도 필요합니다.
You can spend an hour watching the stream as your car trains and observing its behaviour (and I've done it myself before), but you might not have the time to do this. Also, you might blink, you know? Finally, if your car is fast, like really fast, it could do all 5 evaluation laps in one minute. First you wait 4-7 minutes for the evaluation to start, then you see it take 4-7 minutes to stop. Video? Sorry, you've missed it.
차를 한 시간 훈련하는 동안 스트림을 보면서 그 차의 행동을 관찰할 수도 있습니다 (예전엔 저도 이렇게 했습니다.) 하지만 항상 이렇게 시간이 충분이 있지는 않을 겁니다. 또한 당신이 눈을 깜빡이는 동안 무엇인가를 놓칠 수 있죠. 당신의 차가 정말 정말 빠르다면 1분 안에 5번의 평가를 끝낼 수도 있습니다. 일단 평가작업이 시작하기 까지 4~7분을 기다려야 합니다. 그리고 나서 완료 될 때까지 4~7분을 기다립니다. 비디오요? 안 됐지만 당신을 그것을 볼 기회를 놓쳤습니다.
Yeah, I'm stretching this a bit too far. Having data you can plot, compile, transform and replay over and over again will always be a handy solution. That's why I love what guys at Amazon have shared inthe DeepRacer workshop repository (link takes you to GitHub).
네, 제가 설명을 질질 끌고 있네요. 데이터를 가지고 플롯, 컴파일, 변환 및 재생하는 방법이 훨씬 더 편리할 겁니다. 그래서 아마존의 사람들이 DeepRacer 워크샵 저장소 (GitHub로 연결되는 링크)를 공유 하는 것을 저는 좋아합니다.
Log analysis
While we're here, I hope you'll like this post. Once you're done reading, I'd like to recommend reading about what I have come up with based on this tool in"Analyzing the AWS DeepRacer logs my way"- it might help you and give a couple ideas for your own modifications.
이 글이 당신에게 도움이 되길 바랍니다. 일단 읽고 나면, "AWS DeepRacer 로그 분석하기"에서이 도구를 기반으로 작성한 내용을 읽어 보는 것을 추천합니다. 그 글을 읽으면 여러모로 도움이 될 수 있으며 자신 만의 modifications를 위한 몇 가지 아이디어를 얻을 수 있을 겁니다.
The tools provided include a couple functions to help working with the data, track data, a Jupyter notebook that leads you through the analysis and some sample data.
제공된 도구에는 데이터 작업, 데이터 추적, 분석 및 샘플 데이터를 안내하는 Jupyter 노트북을 지원하는 몇 가지 기능이 포함되어 있습니다.
It lets you assemble aggregated information about your car's performance, plot its behaviour on the track, plot reward values depending on the car's location during evaluation, plot the route during the evaluation (including the virtual race evaluation), analyse the behaviour depending on the visual input, detect which pieces of image matter to the car the most.
그것은 당신이 다음과 같은 정보를 집계해서 assemble 하도록 합니다. '자동차의 퍼포먼스', 트랙에서의 행동에 대한 플롯', '평가 기간 동안 자동차의 위치에 근거한 reward 값에 대한 픞롯', '평가 기간 동안 (virtual race evaluation을 포함) route에 대한 plot', 'visual input에 근거한 행동 분석', '자동차에 어떤 image matter들이 가장 많이 탐지 되는지' 등등.
I may have lost my skills in statistics and might not be able to predict future trends based on the time series anymore (I still remember that the classic linear regression model is calculated with ((X'X)^(-1))X'y, I still have dreams of econometrics lectures with Professor Osiewalski), but I can appreciate good statistics when I see them. The guys at Amazon have provided an excellent tool that I have used before to present some images to you. I didn't however know what the ipynb file provided with the tools was. I mean, I managed to open it (GitHub comes with a viewer), but it wasn't until the AWS Summit that I actually installed Jupyter Notebook and understood what power it gives me. Nice!
나는 통계에서 나의 기술을 잃어 버렸을지도 모른다. 그리고 더 이상 time series에 기초한 미래의 추세를 예측할 수 없을지도 모른다. (나는 고전적인 linear regression model이 (X'X) ^ (- 1) X ' y로 계산된다는 것을 아직 기억하고 있다. 나는 아직 Osijalski 교수의 econometrics 강의를 꿈꾸고 있다.) 그러나 나는 좋은 통계를 볼 때 그것에 고마와 한다. 아마존의 사람들은 내가 당신에게 이미지를 보여주기 위해 사용했던 훌륭한 도구를 제공했습니다. 그러나 ipynb 파일이 제공 한 도구가 무엇인지는 알지도 못했습니다. 내 말은, 나는 그것을 오픈하기는 했지만 (GitHub에는 뷰어가 포함되어 있음), 내가 실제로 Jupyter Notebook을 설치하고 그것이 가지고 있는 강력함을 이해하게 된 것은 AWS Summit이었다. Nice!
Summit
Jupyter Notebookis a web application that provides an editor for files containing formatted text, code and its latest results. It can be either hosted or run locally. AWS provides a solution to view notebooks within the SageMaker, but if you tend to leave stuff lying around like me, I wouldn't recommend this solution. The pricing of it matches its usefulness and I tell you, this is a really, really useful tool. I'm exaggerating here, but it does add up if you leave the EC2 running.
Jupyter Notebook은 형식이 지정된 텍스트, 코드 및 그것들의 최신 결과를 포함하는 파일에 대한 편집기를 제공하는 웹 application입니다. 호스팅되거나 로컬에서 실행될 수 있습니다. AWS는 SageMaker에서 노트북을 볼 수있는 솔루션을 제공하지만 나처럼 물건을 놓고 다니는 경향이 있다면이 솔루션을 권장하지 않습니다. 나는 그것이 가성비 면에서 좋다고 생각한다. 그것은 정말 정말 정말 유용한 툴이다. 조금 과장하는 면이 있지만 만일 당신이 EC2를 달리게 내버려두면 그것은 add up된다.
The code can be in one of many languages, python included. I think more interesting stuff will come out of actually using the notebook.
코드는 파이썬을 포함해 다른 많은 언어로 작성될 수 있다. 실제로 노트북을 사용하면 훨씬 더 흥미로운 사실들을 만나보게 될 것이다.
Installation
To install it you need to be familiar with either Python or Anaconda. You will find theinstallation instructions on their website. I'll leave you with this, I am assuming that if you're here and still reading, you know how to install a Python interpreter and how to install modules.
설치하려면 Python 또는 Anaconda에 익숙해야합니다. 웹 사이트에서 설치 지침을 찾을 수 있습니다. 일단 파이썬 인터프리터를 설치하는 방법과 모듈을 설치하는 방법을 알고 있다고 가정하겠습니다.
익숙하다면 당신은 또한 Docker를 사용할 수 있습니다. 이 문서 (Jupyter 문서로 이동)는 이를 수행하는 방법을 설명합니다. Tensorflow notebook docker image는 모든 것을 설치하지 않고도 로그 분석 노트북을 실행하는 데 가장 가까운 이미지라고 생각합니다.
Note: I am referring to instructions which in most cases contain details for Linux/Mac/Windows. I use Linux and so might miss the shortcomings of how other systems are described, but they do look well written. I am also assuming that you have some level of confidence working either with Python/pip or Anaconda/conda. In case of Python I use Python 3 and I recommend using it. It's time for Python 2.7 to go.
참고 : 대부분의 경우 Linux / Mac / Windows에 대한 세부 정보가 포함 된 지침을 언급하고 있습니다. 나는 리눅스를 사용하기 때문에 다른 시스템이 어떻게 기술되는지에 대한 단점을 놓치지 만 잘 작성된 것처럼 보인다. 나는 또한 당신이 Python / pip 또는 Anaconda / conda로 어느 정도 자신감을 가지고 있다고 가정하고 있습니다. 파이썬의 경우에는 파이썬 3을 사용합니다. 파이썬 2.7이 나올 때입니다.
Project structure
In thelog-analysisfolder you will find a couple things: log-analysis 폴더에는 다음과 같은 것들이 있습니다.
intermediate_checkpoint- folder for data used in some of the analysis
logs- folder for the logs
simulation_episode- you'll be downloading images from the simulation to understand what actions the car is likely to take
tracks- folder for the tracks points
DeepRacer Log Analysis.ipynb- the notebook itself
cw_utils.py- utility methods for downloading of logs
log_analysis.py- utility methods for the analysis
Dependencies to run log-analysis
Before we continue with running the notebook itself, let's have a look at the required dependencies that you can install using pip:
노트북을 계속 실행하기 전에 pip를 사용하여 설치할 수있는 관련된 필수 요소들을 살펴 보겠습니다.
boto3 - python library for interacting with AWS
awscli - not really needed, but useful - I used it to runaws configureand set up default access to AWS. Once I've done this, I didn't have to provide credentials in code.Click here for installation instructions, thenclick here for configuration instructions. Remember DeepRacer region isus-east-1.Click here for instructions to set up an IAM user. The roles listed in a page linked there do not provide permissions needed to get a list of streams in a log group, I've learned this one is part of role CloudWatchLogFullAccess or something like that. This is somewhat excessive so you might just want to apply permissionDescribeLogStreams
numpy, tensorflow, PIL, glob - analysis of actions probability (picture to action mapping)
cv2, numpy, tensorflow, glob - analysis of an image heatmap (what the car cares about when processing the picture)
Some of those will already be available in your Python/Anaconda bundle or venv evironment. Others you should install yourself.
그 중 일부는 이미 Python / Anaconda 번들 또는 venv 환경에서 사용할 수 있습니다. 다른 것들은 직접 설치해야합니다.
I may write a bit more about some of them at some point.
나는 그들 중 일부에 대해 좀 더 자세히 기술 할 것이다.
Running the notebook
We could have done that earlier, but I like being prepared.
이전에 다룬적이 있지만 다시 설명하겠습니다.
To run the notebook, go to thelog-analysisfolder in a terminal and run:
notebook을 실행하려면 터미널에서 log-analysis 폴더로 가서 다음을 실행하세요.
jupyter notebook 'DeepRacer Log Analysis.ipynb'
A browser will open with a Jupyter notebook.
그러면 브라우저가 열리면서 주피터 노트북이 실행 될 겁니다.
Running the code
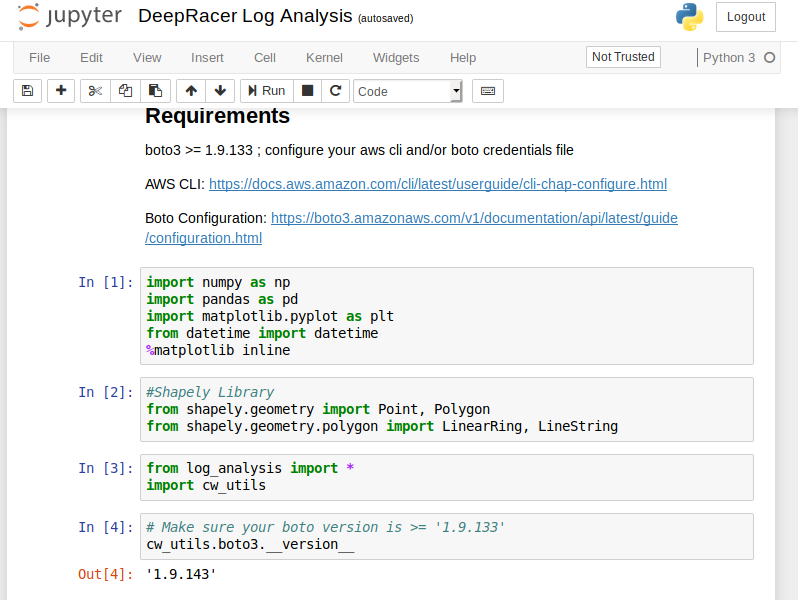
The editor will look more or less like that: 편집기는 아래와 같이 생겼을 겁니다.
The usual stuff: some text, a toolbar, a menu, some code.
When you get on the code section and press "Run" in the toolbar, the code executes, output (if available) gets printed out. That's pretty much how you go through the document: read, execute, analyse results of the code run.
코드 섹션에서 도구 모음의 "실행"을 누르면 코드가 실행되고 출력 (사용 가능한 경우)이 인쇄됩니다. 코드를 실행하고 결과를 읽고, 실행하고, 분석합니다.
노트북 사용에 관한 간단한 문서에서 Jupyter 노트북으로 작업하는 것에 대한 몇 가지 힌트를 찾을 수 있습니다.
Analysis
When you start working with your notebook, be sure to execute the code blocks with imports at the top. They also include an instruction to display plotted images in the notebook.
notebook 작업을 시작할 때는 코드 블록 위에 imports를 먼저 한 후에 실행해야 합니다. 또한 노트북에 플롯 된 이미지를 표시하는 지침도 포함됩니다.
The files currently available in the data folders are samples. You will be using your own and downloading them as you go through the notebook.
현재 데이터 폴더에서 사용할 수있는 파일은 샘플입니다. 노트북을 사용하면서 당신의 파일을 다운로드 할 겁니다.
The notebook itself has quite a bit of helping code in it like the mentioned downloading of logs or loading the track info. I will not be covering it here.
노트북 자체는 위에서 언급 한 로그 다운로드 나 트랙 정보로드와 같이 코드 자체에 도움이되는 코드를 가지고 있습니다. 나는 여기서 그것을 다루지는 않을 것이다.
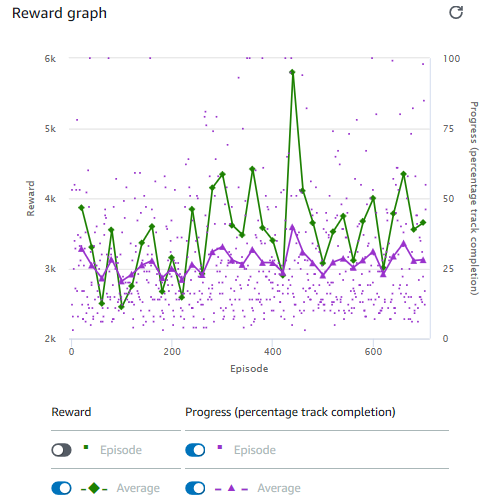
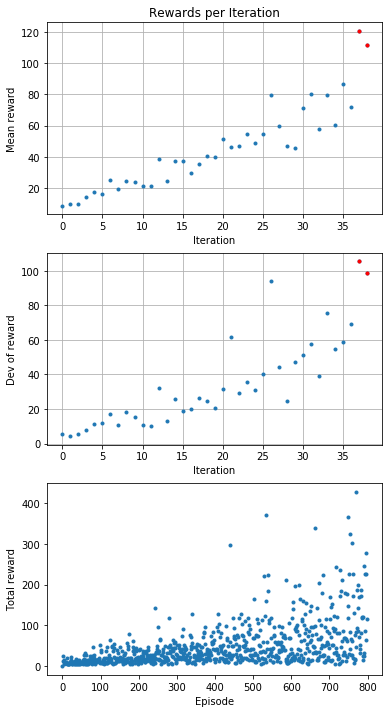
Plot rewards per Iteration
This analysis takes the rewards and calculates mean and standard deviation. It then displays those values per iteration. Also a reward per episode is presented.
이 분석은 보상을 취하고 평균 및 표준 편차를 계산합니다. 그런 다음 반복 당 값을 표시합니다. 에피소드 당 보상도 표시됩니다.
Analyze the reward function
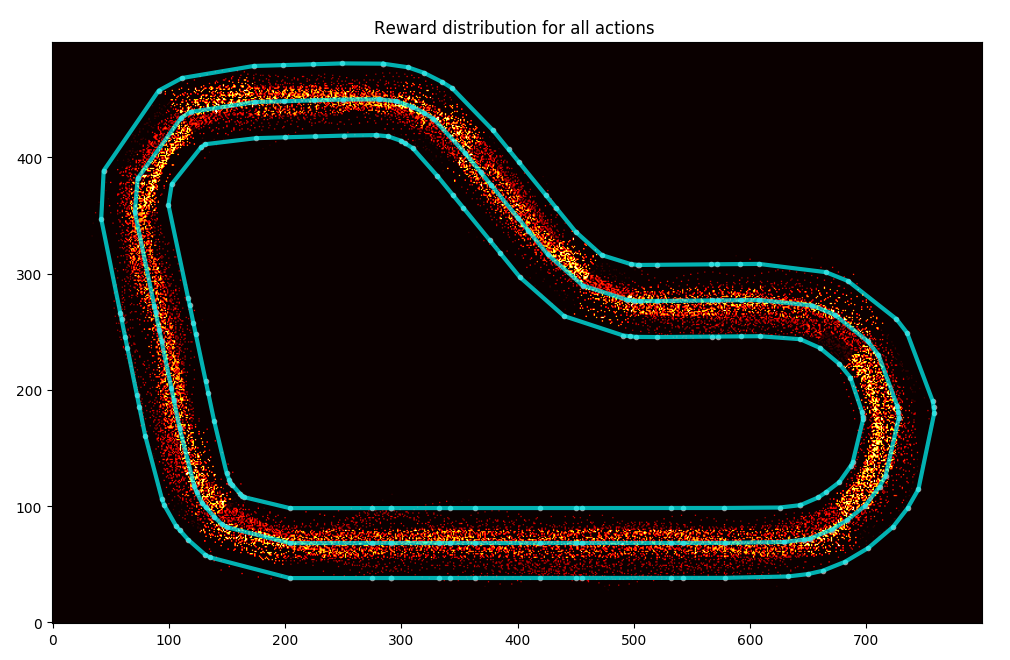
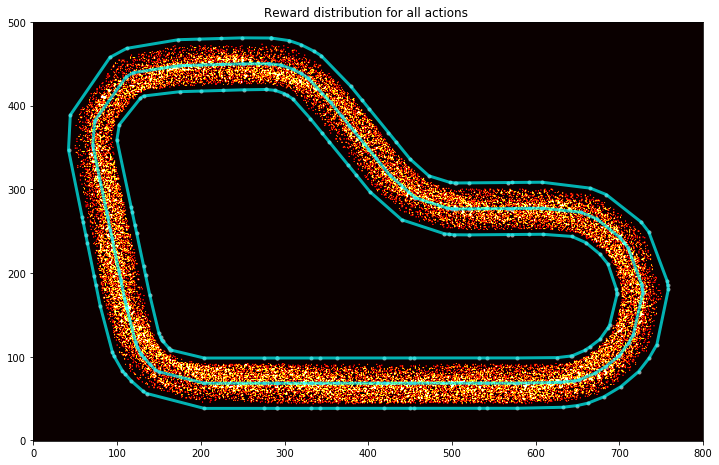
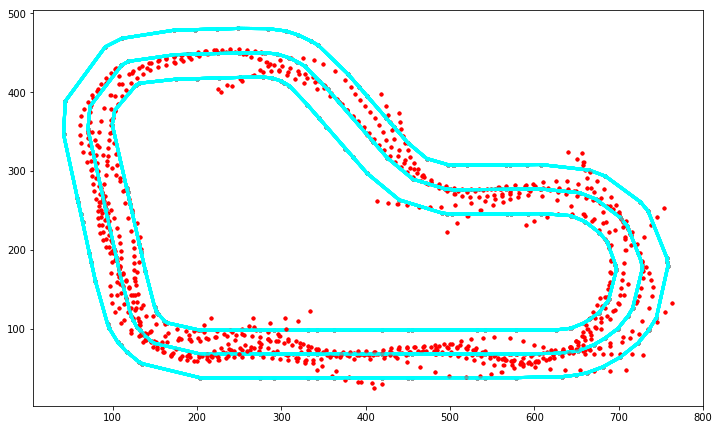
The next section uses the track data and training logs to display where the car goes and what reward it receives.
다음 섹션에서는 트랙 데이터와 트레이닝 로그를 사용하여 자동차가 가는 곳과 받는 보상을 표시합니다.
You can display all the points where the car had a reward function calculated:
자동차에 보상 기능이 계산 된 모든 지점을 표시 할 수 있습니다.
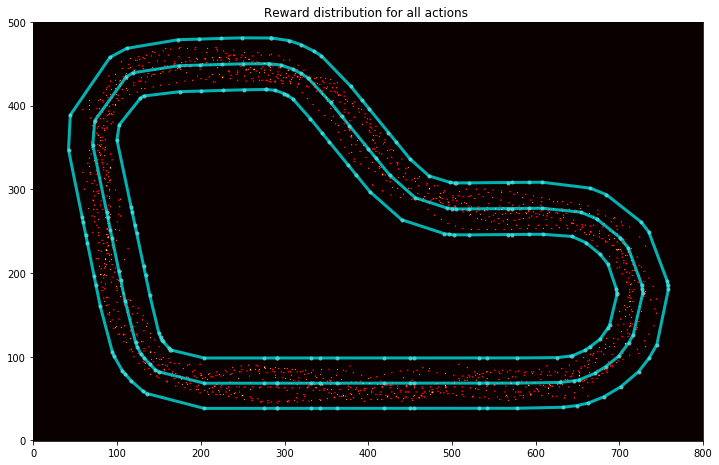
In this one above you can see how the car is all over the place. But then have a look at this one (this is a reward distribution for my AWS Summit London model):
위 그림을 보면 차가 여기 저기 많이 다녔다는 것을 알 수 있습니다. 그런데 이걸 한번 봐 보세요. (이것은 AWS Summit London 모델의 reward distribution입니다).
As you can guess, I trained my model to cut corners and to go straight on the straight line.
짐작할 수 있듯이, 나는 내 모델을 코너에서는 안쪽으로 돌고 직선도로에서는 똑바로 가도록 훈련했습니다.
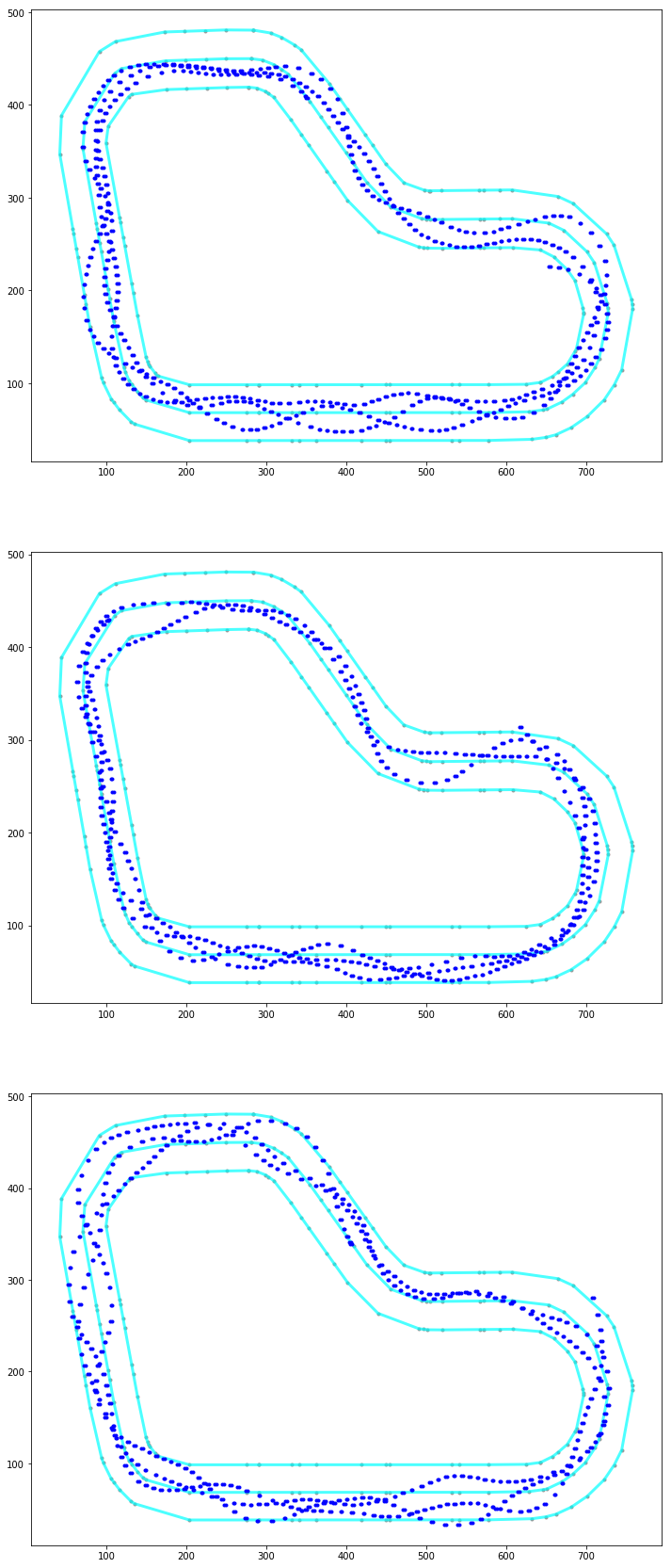
You can display a specific iteration:
이렇게 특정 iteration을 표시할 수 있습니다.
You can get top iterations and analyse the path taken:
top iterations 에서 통과한 길을 분석할 수도 있습니다.
Or just a particular episode: 특정 에피소드만을 볼 수도 있고
Or maybe a particular iteration: 또는 특정 iteration만을 볼 수도 있습니다.
Actions breakdown
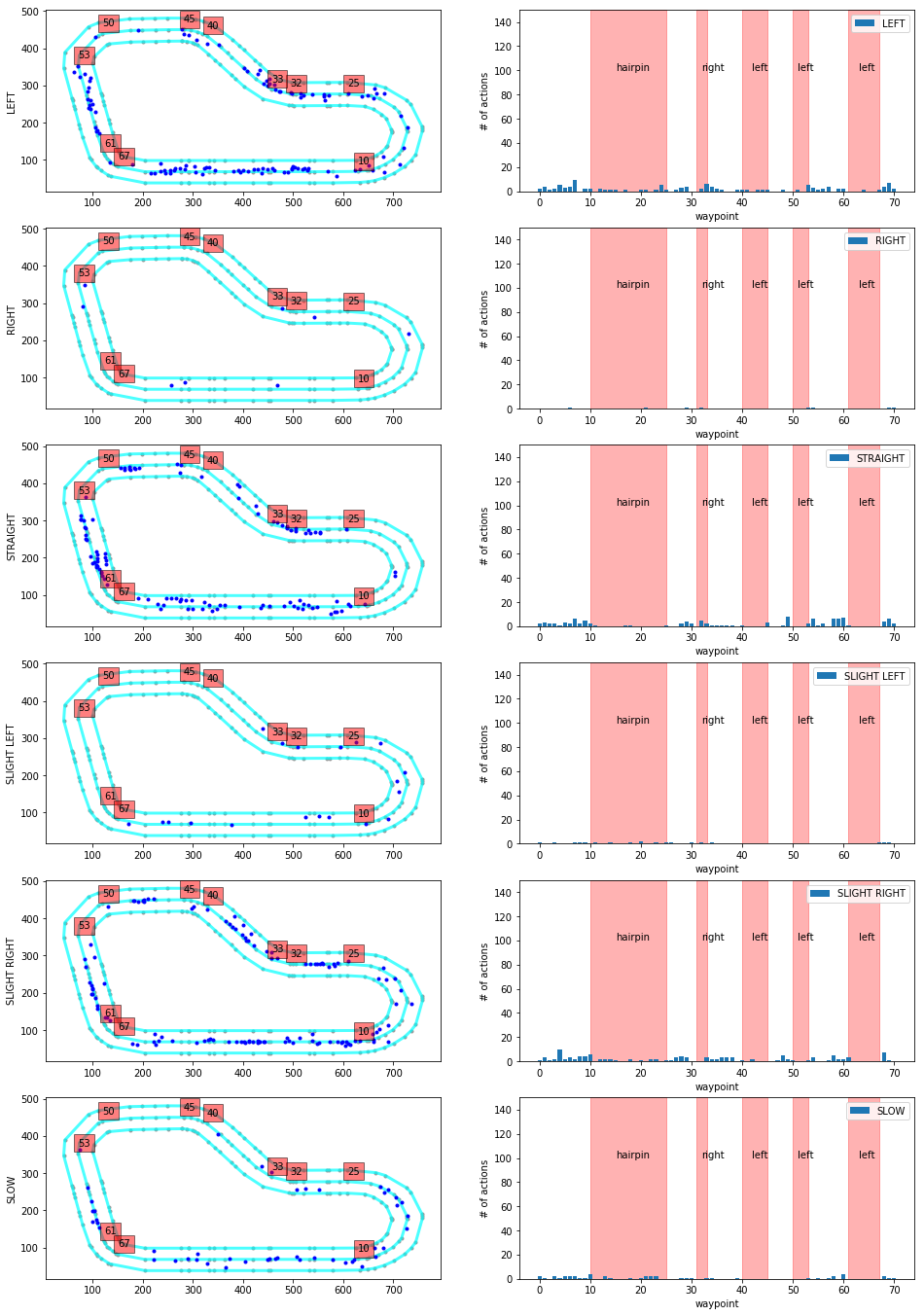
This function is pretty damn impressive, but applicable to the re:invent track only. I might spend some time and make something similar for the London Loop.
이 기능은 상당히 인상적이지만 re : invent 트랙에만 적용됩니다. London Loop에서도 비슷하게 시간을 투자해서 비슷한 그림들을 만들어 낼 수도 있습니다.
The output of this function is a graph of decisions taken in different parts of the track. The track is broken down into sections like turns and stuff, then the car's decision process is evaluated and displayed on a histogram. This may help you spot undesired decisions and discourage the car from taking them going forward. Just bear in mind that some wrong actions have a rather low impact and therefore it might be not worth training away from them as you might overtrain.
이 기능의 출력은 트랙의 다른 부분에서 취해진 결정의 그래프입니다. track은 sections으로 나눠집니다. 그리고 나서 자동차에 결정과정은 평가되고 히스토그램에 표시됩니다. 이것을 통해 여러분은 원하지 않는 결정을 찾아내고 앞으로는 자동차가 그런 결정을 하지 않도록 할 수 있게 도와 줍니다. 어떤 잘못된 행동은 영향이 미미할 수 있습니다. 그것들을 너무 과도하게 훈련 시키면 별로 효과가 없을 수도 있습니다.
Simulation Image Analysis
In here you will be loading trained models, loading screens from simulation and observing probability of taking a particular action.
여기에서는 숙련 된 모델을 로드하고, 시뮬레이션에서 화면을 로드하고, 특정 작업을 수행 할 probability을 관찰합니다.
First you need to download the intermediate checkpoints, then load the session model from the file. The final graph displays separation of probability of taking particular actions. If I understand properly, this can be used to determine how confident the model is about taking a specific action. The bigger difference from the best to second-best action, the better.
먼저 intermediate checkpoints를 다운로드 한 다음 파일에서 세션 모델을로드해야합니다. 마지막 그래프는 특정 동작을 취할 probability의 separation를 표시합니다. 내가 제대로 이해한다면, 이것은 모델이 특정 행동을 취하는 것에 대한 confident을 결정하는 데 사용될 수 있습니다. 최선책과 차선책 행동의 차이가 크면 클수록 좋습니다.
I haven't used it before. I guess it will be handy when I understand more of it.
나는 전에 이것을 사용하지 않았습니다. 이것에 대해 더 많은 것을 이해할수록 좀 더 편리하게 사용할 수 있을 겁니다.
Model CSV Analysis
I don't really get this one, sorry. I thin it's just about downloading some metadata about the training and showing distribution of rewards and length of episode (the longer the episodes, the more stable the model.
죄송하지만 이 부분은 제가 제대로 이해하지 못했습니다. 나는 훈련에 대한 메타 데이터를 다운로드하고 보상의 분배와 에피소드의 길이를 보여주는 것에 관한 것이라고 생각합니다 (에피소드가 길수록 모델이 더 안정적입니다).
I will have to learn to understand it better. The description says about downloading the model from DeepRacer Console, but the analysis is happening on some csv file only. Maybe it's part of the model archive?
이것을 더 잘 이해하는 법을 배워야 할 것 같습니다. DeepRacer Console에서 모델을 다운로드하는 것에 대한 설명이 있지만 분석은 일부 CSV 파일에서만 발생합니다. 어쩌면 모델 아카이브의 일부일까요?
Evaluation Run Analysis
This is specifically useful since you can look at your evaluations both in the console and in the virtual race.
이것은 콘솔과 가상 레이스에서 평가를 볼 수 있으므로 특히 유용합니다.
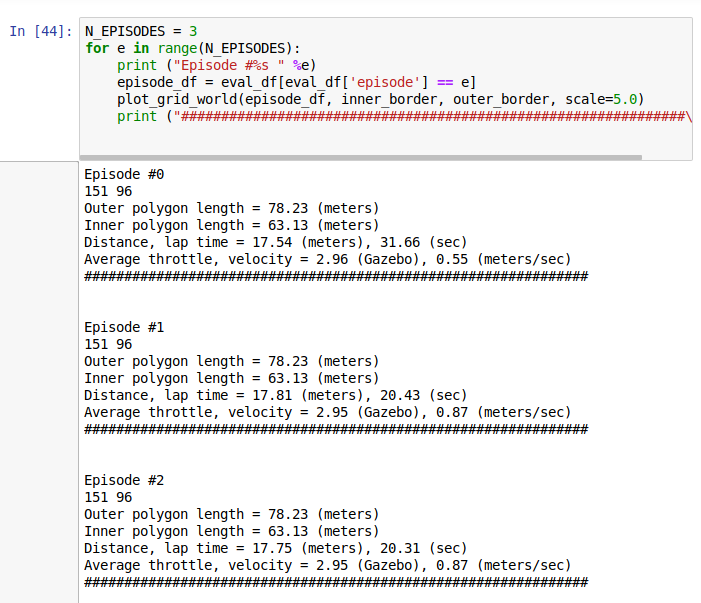
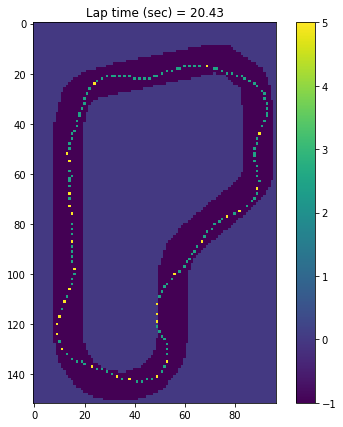
You can load logs from evaluation, then plot them on the track to see the path taken, distance covered, time, average throttle, velocity etc.
평가에서 로그를 로드 한 다음 트랙에 그려서 경로, 거리, 시간, 평균 스로틀, 속도 등을 확인할 수 있습니다.
On the plotted images you can see what throttle decision the car has taken.
플롯 된 이미지에서 자동차가 취한 throttle결정을 볼 수 있습니다.
Just being able to compare faster and slower results from the evaluation can be very useful in terms of making decisions on future training sessions.
보다 빠르고 느린 평가 결과를 비교할 수 있다면 향후 교육 세션에 대한 결정을 내리는 데 매우 유용 할 수 있습니다.
What is the model looking at
I haven't used this one yet and I treat it more like a helpful utility to understand what the model cares about. After loading a model and some images, it is possible to get a processed image with highlighted elements that are of value when making decisions. It looks like that:
나는 이것을 아직 사용하지 않았으며 모델이 무엇을 중요하게 생각 하는지를 이해하는 데 도움이되는 유틸리티처럼 취급합니다. 모델 및 일부 이미지를로드 한 후에는 결정할 때 가치가있는 강조 표시된 요소가있는 처리 된 이미지를 가져올 수 있습니다. 그것은 다음과 같이 보입니다.
Example
Let's say I want to analyse one of my virtual race evaluations. I want to see the race information from when I managed to do the 23 seconds. I located the log stream starting withsim-ynk2kzw3q7lf, located in/aws/deepracer/leaderboard/SimulationJobs.
내 가상 경주 평가 중 하나를 분석하려고한다고 가정 해 봅시다. 나는 23 초를 할 수 있었을 때부터 경주 정보를보고 싶다. / aws / deepracer / leaderboard / SimulationJobs에있는 sim-ynk2kzw3q7lf로 시작하는 로그 스트림을 찾았습니다.
Then load the track data: 그리고 트랙 데이터를 로드 합니다.
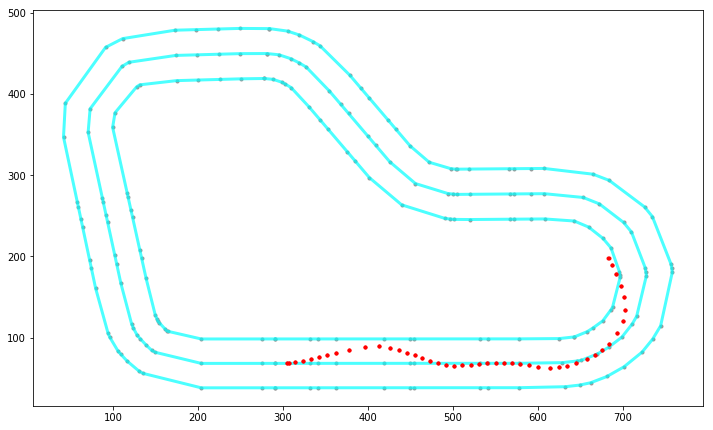
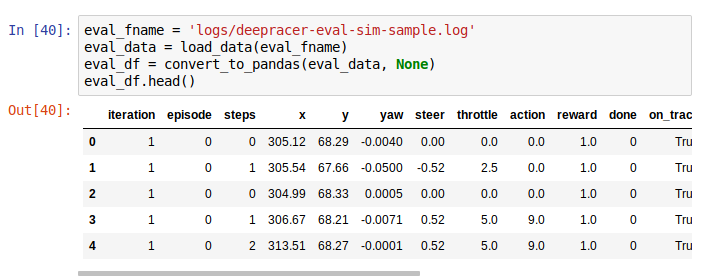
Then fetch the evaluation data and plot it (some small corrections to the code needed):
그런 다음 평가 데이터를 가져 와서 플롯합니다 (코드에 약간의 수정이 필요함).
The result comes as a scrollable frame. It's quite annoying and can be expanded by a single click on the left margin:
결과는 스크롤 가능한 프레임으로 제공됩니다. 매우 성가 시며 왼쪽 여백을 한 번 클릭하여 확장 할 수 있습니다.
From here you can clearly see I had a stable, but slow model. I made some advancements from that point, but I'll wait with sharing them till the London Loop virtual race is over.
여기서 안정적이지만 느린 모델을 분명히 볼 수 있습니다. 나는 그 시점부터 몇 가지 발전을 이루었지만, 런던 루프 가상 경주가 끝날 때까지 나눠서 기다릴 것입니다.
Track data
프로젝트에 몇 가지 샘플 트랙이 포함되어 있습니다. London Loop은 그들 중 하나가 아니기 때문에 가상의 인종에 참여하고 있기 때문에 스스로 준비했습니다. 내가 제기 한 GitHub 끌어 오기 요청에서 가져올 수 있습니다. 다행스럽게도 곧 병합 될 예정이지만, 지금은 워크샵 저장소에 가입하여 거기에서 London_Loop_track.npy 파일을 다운로드 할 수 있습니다.
log_groupis the log group in CloudWatch that you want to download the logs from. The log groups you will be interested in are:
/aws/robomaker/SimulationJobs- logs from training simulations and evaluations,
/aws/deepracer/leaderboard/SimulationJobs- logs from evaluations submitted to a virtual race,
not_older_than- date string to provide the lower time limit for the log event streams; if there is at least one log event newer than that, the stream will be downloaded; For today logs (19th of May) I set it to2019-05-19; refer todateutil documentationto learn about accepted formats,
older_than- upper limit date, pretty similar as not_older_than but the other way round; If you set it to2019-05-19, the newest entries in accepted stream will be from 2019-05-18 23:59:59.999 at the latest.
Return value is a list of tuples containing:
log file path
simulation id
first log event timestamp
last log event timestamp
Entries are ordered by occurence of the last timestamp event.
If you are using a non-root account to access DeepRacer, you may be needed permissions to run method describe_log_streams.
If you call the method withpathprefixvalueooh/eeh/ooh/ah/aah/ting/tang/walla/walla/bing/bang/deepracer-eval-andlog_groupis/aws/deepracer/leaderboard/SimulationJobs, and there is a log_stream for simulationsim-l337h45h, the file created will beooh/eeh/ooh/ah/aah/ting/tang/walla/walla/bing/bang/deepracer-eval-sim-l337h45h.log
That's all folks
I'm not pretending I know much about the notebooks. Two weeks ago I didn't understand what they were or how to use them. This one has proven to be extremely useful when analysing my model's performance, and not only mine.
Well done, you've made it this far! Once again, let me mention my modification of the tool:"Analyzing the AWS DeepRacer logs my way"- I have raised a Pull Request to AWS with this change but you can already enjoy it now from my fork.
나는 노트북에 대해 많이 알고있는 척하지 않습니다. 2 주 전 나는 그들이 무엇인지, 어떻게 사용하는지 이해하지 못했습니다. 이 모델은 내 모델의 성능을 분석 할 때 매우 유용하다는 것이 입증되었습니다.
잘 했어, 너 지금까지 해냈어! "AWS DeepRacer 로그 분석하기"-이 변경으로 AWS로 끌어 오기 요청을 제기했지만 현재 내 포크에서 이미이 기능을 사용할 수 있습니다.
Great thanks to Lyndon Leggate for spotting that I misused the logs api initially. Lyndon is currently in top 10 in London Loop as well, he started the discussion group on Slack that I mentioned in my earlier posts. You are most welcome to join it:click here.
처음에 로그 API를 오용 한 점을 발견 한 Lyndon Leggate에게 감사드립니다. 린든은 현재 런던 루프 (London Loop)에서도 톱 10에 속해 있으며, 이전 글에서 언급 한 슬랙 (Slack)에 대한 토론 그룹을 시작했습니다. 가입하시는 것이 가장 좋습니다 : 여기를 클릭하십시오.
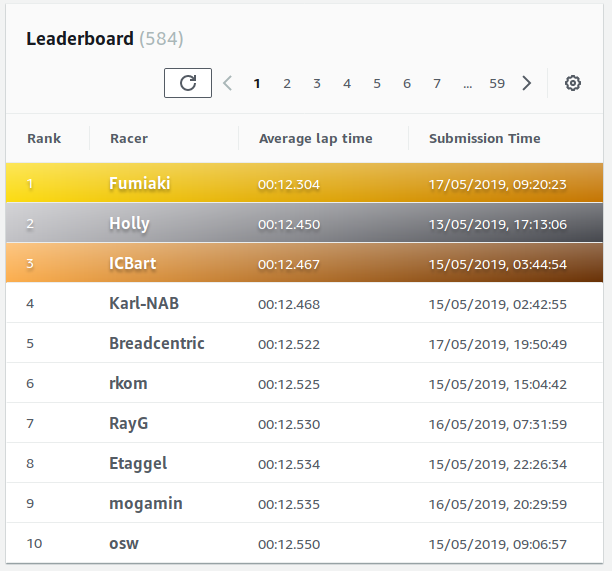
I will be soon writing about the First AWS DeepRacer League Virtual Race called London Loop which I'm taking part in. It's different from the London Loop and much bigger in scale - almost 600 participants so far (and more to come, I'm sure), still two weeks left to compete, top lap of 12.304 seconds and fifty best entries are within a second of that. And I'm fifth at the moment :)
런던 루프와 다른 점은 규모가 훨씬 더 큰 것입니다. 거의 600 명의 참가자가 참여하고 있습니다. 물론), 경쟁하기 위해 2 주 남겨 뒀다, 12.304 초의 최고의 랩과 50 최고의 항목은 그것의 두 번째 이내에있다. 그리고 나는 지금 5 번째입니다 :)