개발자로서 현장에서 일하면서 새로 접하는 기술들이나 알게된 정보 등을 정리하기 위한 블로그입니다. 운 좋게 미국에서 큰 회사들의 프로젝트에서 컬설턴트로 일하고 있어서 새로운 기술들을 접할 기회가 많이 있습니다. 미국의 IT 프로젝트에서 사용되는 툴들에 대해 많은 분들과 정보를 공유하고 싶습니다.
# Calculate 3 markers that are at varying distances away from the center line marker_1 = 0.1 * track_width marker_2 = 0.25 * track_width marker_3 = 0.5 * track_width
# Give higher reward if the car is closer to center line and vice versa if distance_from_center <= marker_1: reward = 1.0 elif distance_from_center <= marker_2: reward = 0.5 elif distance_from_center <= marker_3: reward = 0.1 else: reward = 1e-3 # likely crashed/ close to off track
return float(reward)
이 때의 트랙은 직선 트랙이었다.
그래서 중앙선에 가까운 경우 reward를 주는 로직을 만들어서 훈련 시켰다.
두번째도 Straigh track인데 함수를 조금 바꿨다.
def reward_function(params): ''' Example of rewarding the agent to follow center line ''' reward=1e-3
※ 본 리그는 메가존 클라우드가 자체적으로 진행하는 행사로 AWS에서 개최하는 리그와 무관합니다. ※ 상금 및 경품 지급 시 소득세 등 제세공과금이 차감 혹은 청구 됩니다. ※ 본 경기 규칙은 AWS DeepRacer League 규칙을 따르며 트랙 또한 re:Invent 2018 트랙에서 진행 됩니다.
========================================
저는 AWS Deepracer 모델 차량을 7월 중순에 받을 예정이라서 10월 3일 토론토에서 열리는 경기에 참가할 수 있을 것 같습니다.
휴가 내고 비행기 타고 가서 참가할 생각인데....
어떻게 될 지 아직......
지금 제가 만들고 있는 모델은 Kumo Torakku 트랙에서 23초를 기록하고 그 이후에는 전혀 기록이 나아 지질 않고 있습니다.
지금 1,2,3 등은 모두 10초 대 이던데.... 그런 기록은 어떻게 하면 낼 수 있을 지.......
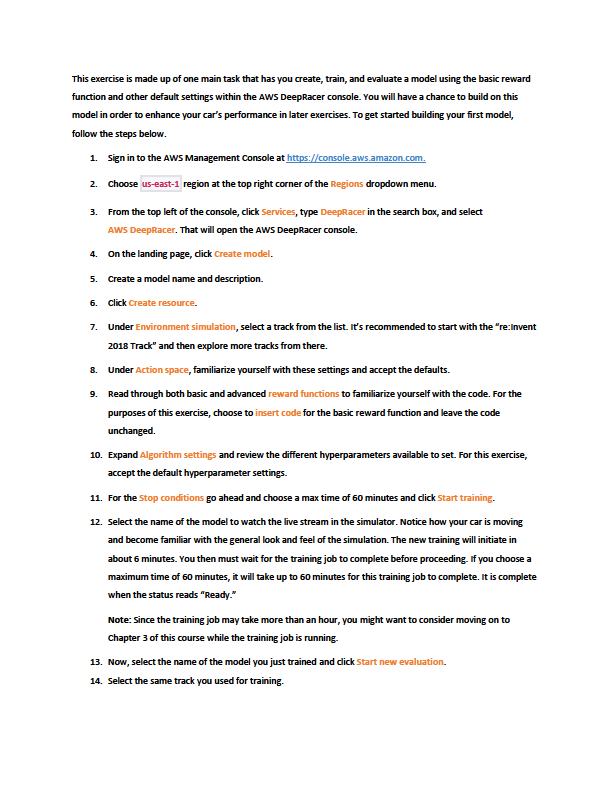
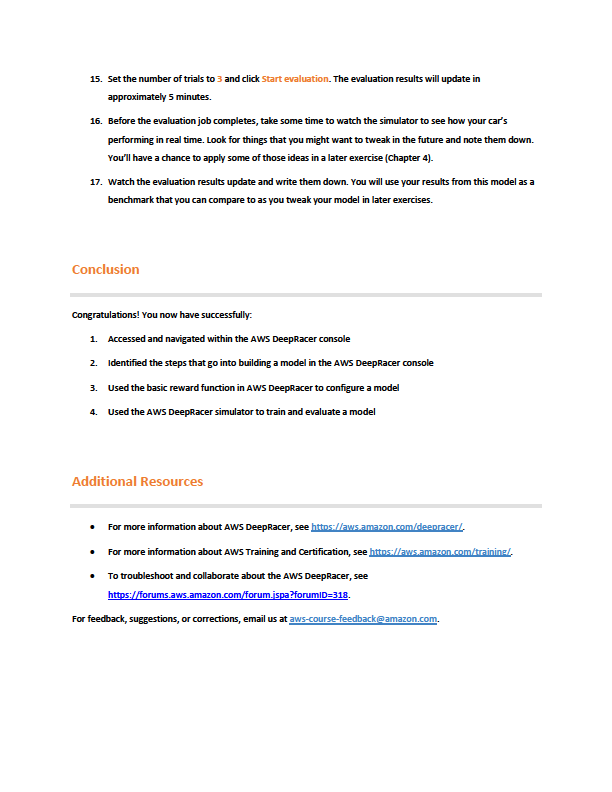
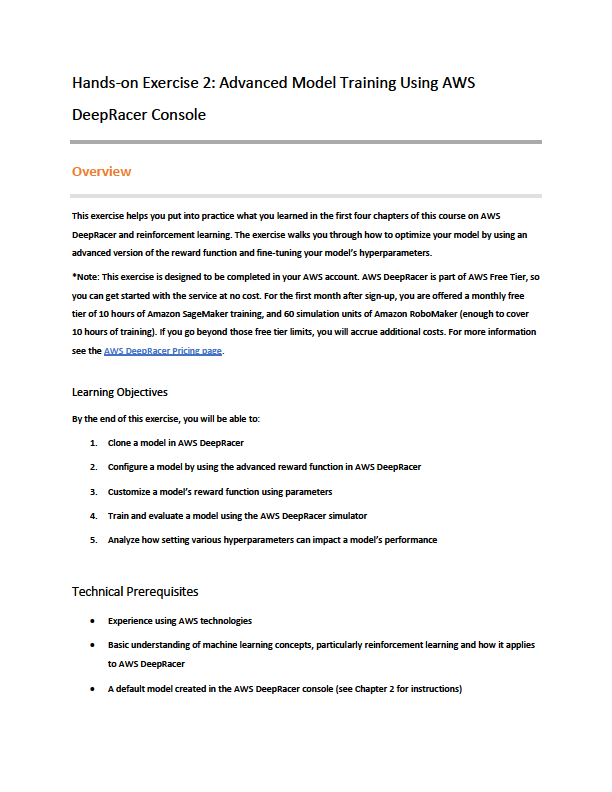
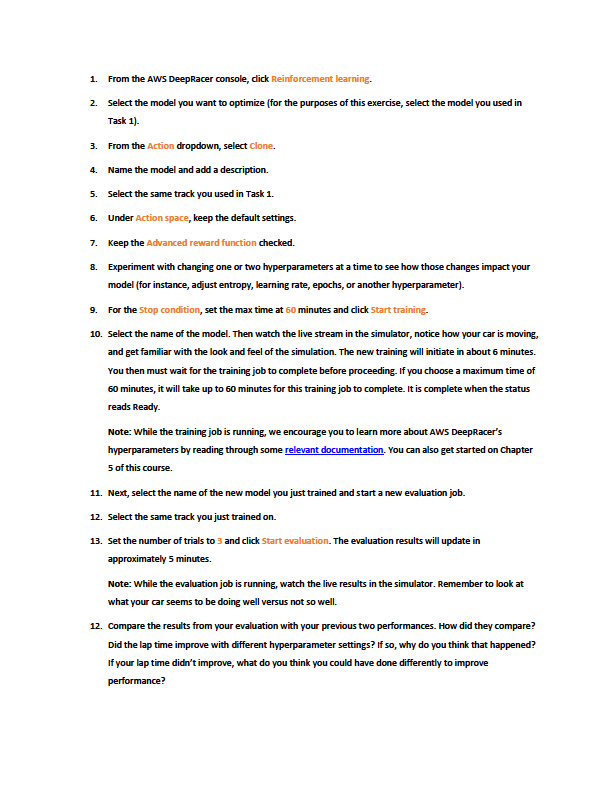
Hands-on Exercise 1: Model Training Using AWS DeepRacer Console
This is the first of four exercises that you will encounter in this course. This first exercise guides you through building, training, and evaluating your first RL model using the AWS DeepRacer console. To access the instructions for three of these exercises,download and unzip this course package. For this particular exercise, find and open the relevant PDF file and follow the steps within to complete the exercise.
*Note:This exercise is designed to be completed in your AWS account. AWS DeepRacer is part of AWS Free Tier, so you can get started at no cost. For the first month after sign-up, you are offered a monthly free tier of 10 hours of Amazon SageMaker training and 60 simulation units of Amazon RoboMaker (enough to cover 10 hours of training). If you go beyond those free tier limits, you will accrue additional costs. For more information, see the AWS DeepRacer Pricing page.
AWSTemplateFormatVersion: "2010-09-09" Description: 'AWS DeepRacer: Driven by Reinforcement Learning' Parameters: SagemakerInstanceType: Description: 'Machine Learning instance type that should be used for Sagemaker Notebook' Type: String AllowedValues: - ml.t2.medium - ml.t2.large - ml.t2.xlarge - ml.t3.medium - ml.t3.large - ml.t3.xlarge - ml.m5.xlarge Default: ml.t3.medium CreateS3Bucket: Description: Create and use a bucket created via this template for model storage Default: True Type: String AllowedValues: - True - False ConstraintDescription: Must be defined at True|False. VPCCIDR: Description: 'CIDR Block for VPC (Do Not Edit)' Type: String Default: 10.96.0.0/16 PUBSUBNETA: Description: 'Public Subnet A (Do Not Edit)' Type: String Default: 10.96.6.0/24 PUBSUBNETB: Description: 'Public Subnet B (Do Not Edit)' Type: String Default: 10.96.7.0/24 PUBSUBNETC: Description: 'Public Subnet C (Do Not Edit)' Type: String Default: 10.96.8.0/24 PUBSUBNETD: Description: 'Public Subnet D (Do Not Edit)' Type: String Default: 10.96.9.0/24 S3PathPrefix: Type: String Description: 'Bootstrap resources prefix' Default: 'awsu-spl-dev/spl-227' S3ResourceBucket: Type: String Description: 'Bootstrap S3 Bucket' Default: 'aws-training' Conditions: CreateS3Bucket: !Equals [ !Ref CreateS3Bucket, True ] # NoCreateS3Bucket: !Equals [ !Ref CreateS3Bucket, False ] Resources:
# Defining the VPC Used for the sanbox ENV, and notebook instance VPC: Type: 'AWS::EC2::VPC' Properties: CidrBlock: !Ref VPCCIDR EnableDnsSupport: 'true' EnableDnsHostnames: 'true' Tags: - Key: Name Value: 'DeepRacer Sandbox' # There is a few calls made to public to download supporting resources InternetGateway: Type: 'AWS::EC2::InternetGateway' DependsOn: VPC Properties: Tags: - Key: Name Value: 'DeepRacer Sandbox IGW' # Attached this IGW to the sanbox VPC AttachGateway: Type: 'AWS::EC2::VPCGatewayAttachment' DependsOn: - VPC - InternetGateway Properties: VpcId: !Ref VPC InternetGatewayId: !Ref InternetGateway # Default setting in the notebook is to use Public IP address to communicate # between instances running the simulation, and the instances collecting and # processing. A NatGW could have been used with added costs, but would allow for # use of private IP address.
# Found in testing that not all ML instance types may not be deployed or avaliable # in all AZ's within a given region. We are using the newest instance family of T3 PublicSubnetA: Type: 'AWS::EC2::Subnet' DependsOn: VPC Properties: VpcId: !Ref VPC CidrBlock: !Ref PUBSUBNETA AvailabilityZone: !Select - '0' - !GetAZs '' Tags: - Key: Name Value: 'Deepracer Sandbox - Public Subnet - A' PublicSubnetB: Type: 'AWS::EC2::Subnet' DependsOn: VPC Properties: VpcId: !Ref VPC CidrBlock: !Ref PUBSUBNETB AvailabilityZone: !Select - '1' - !GetAZs '' Tags: - Key: Name Value: 'Deepracer Sandbox Public Subnet - B' PublicSubnetC: Type: 'AWS::EC2::Subnet' DependsOn: VPC Properties: VpcId: !Ref VPC CidrBlock: !Ref PUBSUBNETC AvailabilityZone: !Select - '2' - !GetAZs '' Tags: - Key: Name Value: 'Deepracer Sandbox Public Subnet - C' PublicSubnetD: Type: 'AWS::EC2::Subnet' DependsOn: VPC Properties: VpcId: !Ref VPC CidrBlock: !Ref PUBSUBNETD AvailabilityZone: !Select - '3' - !GetAZs '' Tags: - Key: Name Value: 'Deepracer Sandbox Public Subnet - D' # Define the Public Routing Table PublicRouteTable: Type: 'AWS::EC2::RouteTable' DependsOn: - VPC - AttachGateway Properties: VpcId: !Ref VPC Tags: - Key: Name Value: 'Deepracer Sandbox Public Routing Table' # And add in the default route to 0.0.0.0/0 PublicRouteIGW: Type: 'AWS::EC2::Route' DependsOn: - PublicRouteTable - InternetGateway Properties: RouteTableId: !Ref PublicRouteTable DestinationCidrBlock: 0.0.0.0/0 GatewayId: !Ref InternetGateway # Attach the routing table to each of the subnets PublicRouteTableAssociationA: Type: 'AWS::EC2::SubnetRouteTableAssociation' Properties: SubnetId: !Ref PublicSubnetA RouteTableId: !Ref PublicRouteTable PublicRouteTableAssociationB: Type: 'AWS::EC2::SubnetRouteTableAssociation' Properties: SubnetId: !Ref PublicSubnetB RouteTableId: !Ref PublicRouteTable PublicRouteTableAssociationC: Type: 'AWS::EC2::SubnetRouteTableAssociation' Properties: SubnetId: !Ref PublicSubnetC RouteTableId: !Ref PublicRouteTable PublicRouteTableAssociationD: Type: 'AWS::EC2::SubnetRouteTableAssociation' Properties: SubnetId: !Ref PublicSubnetD RouteTableId: !Ref PublicRouteTable # Define a S3 endpoint for all the S3 traffic during training S3Endpoint: Type: AWS::EC2::VPCEndpoint Properties: VpcId: !Ref VPC RouteTableIds: - !Ref PublicRouteTable ServiceName: !Join - '' - - com.amazonaws. - !Ref 'AWS::Region' - .s3 PolicyDocument: Version: 2012-10-17 Statement: - Effect: Allow Principal: '*' Action: - 's3:*' Resource: - '*' # This exercise is going to need a bucket to store any file generated from training # There is a conditions to evaluate if the PRAM is true, else this resource would # not be created. SandboxBucket: Type: 'AWS::S3::Bucket' DeletionPolicy: Retain Condition: CreateS3Bucket Properties: BucketName: Fn::Join: - "-" - - deepracer-trainingexercise - Ref: AWS::Region - Ref: AWS::AccountId # Sagemaker is going to be making calls to Robomaker to launch the sim, and # Sagemaker to launch the training insance. This requries AWS credentals. A # Principal of sagemaker and robomaker needs to be assiged as both service will # assuming this role. Default Sagemaker full access and s3 access is needed. SageMakerNotebookInstanceRole: Type: 'AWS::IAM::Role' Properties: AssumeRolePolicyDocument: Version: 2012-10-17 Statement: - Effect: Allow Principal: Service: - sagemaker.amazonaws.com - robomaker.amazonaws.com Action: - 'sts:AssumeRole' ManagedPolicyArns: - 'arn:aws:iam::aws:policy/AmazonSageMakerFullAccess' Path: / Policies: - PolicyName: DeepRacerPolicy PolicyDocument: Version: 2012-10-17 Statement: - Effect: Allow Action: [ 's3:*', 'iam:GetRole' ] Resource: '*' # This is how the notebook gets loaded on to sagemaker. There is a zip file with # with the needed files, and a second http call to pull down the notebook. # This is only done "OnCreate" - when the sagemaker instance is first deployed # You can can the script get run "OnStart" (when a sagemaker instance changes # from a stopped state to a running state). This would automaticlly update file # to be the latest form source, but could over write changes applied during # your testing SageMakerNotebookInstanceLifecycleConfig: Type: 'AWS::SageMaker::NotebookInstanceLifecycleConfig' Properties: # OnStart: # - Content: # Fn::Base64: # #!/bin/bash # !Sub | # cd SageMaker # chown ec2-user:ec2-user -R /home/ec2-user/SageMaker
OnCreate: - Content: Fn::Base64: !Sub | cd SageMaker curl -O https://us-west-2-${S3ResourceBucket}.s3.amazonaws.com/${S3PathPrefix}/scripts/rl_deepracer_robomaker_coach.ipynb curl -O https://us-west-2-${S3ResourceBucket}.s3.amazonaws.com/${S3PathPrefix}/scripts/rl_deepracer_robomaker_coach.zip unzip rl_deepracer_robomaker_coach.zip chown ec2-user:ec2-user -R /home/ec2-user/SageMaker # Security Group for sagemaker instance running in this VPC SagemakerInstanceSecurityGroup: Type: AWS::EC2::SecurityGroup Properties: GroupDescription: Sagemaker Security Group VpcId: !Ref VPC SecurityGroupIngress: - IpProtocol: tcp FromPort: 1 ToPort: 65535 CidrIp: !Ref VPCCIDR - IpProtocol: udp FromPort: 1 ToPort: 65535 CidrIp: !Ref VPCCIDR SecurityGroupEgress: - IpProtocol: tcp FromPort: 1 ToPort: 65535 CidrIp: !Ref VPCCIDR - IpProtocol: udp FromPort: 1 ToPort: 65535 CidrIp: !Ref VPCCIDR # Creating the Sagemaker Notebook Instance SageMakerNotebookInstance: Type: 'AWS::SageMaker::NotebookInstance' Properties: #NotebookInstanceName: 'DeepracerSagemakerSandbox' NotebookInstanceName: !Join ["-", ["DeepRacerSagemakerSandbox", !Ref "AWS::StackName"]] SecurityGroupIds: - !GetAtt - SagemakerInstanceSecurityGroup - GroupId InstanceType: !Ref SagemakerInstanceType SubnetId: !Ref PublicSubnetA Tags: - Key: Name Value: 'DeepRacer Sandbox' LifecycleConfigName: !GetAtt - SageMakerNotebookInstanceLifecycleConfig - NotebookInstanceLifecycleConfigName RoleArn: !GetAtt - SageMakerNotebookInstanceRole - Arn Outputs: # Display the name of the bucekt that was created from this CFN Stack ModelBucket: Condition: CreateS3Bucket Value: !Ref SandboxBucket # URL to get to the Sagemaker UI, and find the Jupyter button. SagemakerNotebook: Value: !Sub | https://console.aws.amazon.com/sagemaker/home?region=${AWS::Region}#/notebook-instances/${SageMakerNotebookInstance.NotebookInstanceName}